5.1 Dasar DC Drive
Kecepatan pada VSD dapat diatur, untuk mencapai tujuan ini diperlukan controller antara catu daya dan motor DC. Controller merubah tegangan armature sehingga kecepatan yang diharapkan dapat tercapai.
Jika catu daya adalah tegangan DC, maka amplifier pulsa dapat digunakan sebagai controller. Rancangan ini umumnya ditemukan pada DC drive kecil.
Drive dengan daya besar menggunakan converter untuk controller. Converter merubah tegangan AC ke tegangan DC dengan amplitude yang sesuai. Pasokan tegangan AC ke DC drive bervariasi tergantung model dan merknya umumnya tegangan AC nya adalah 230, 400, 460, 575, 690, 830 dan 950 VAC. DC drive tersedia sampai dengan 1000 HP. DC drive saat ini menggunakan microprocessor untuk mengendalikan motor DC.
Power Module
DC drive tersedia dalam bentuk power module. Power module terdiri dari kendali elektronik dan komponen power yang dibutuhkan untuk mengontrol motor DC.
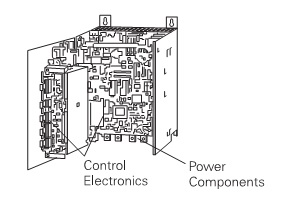
Gambar 5.1 Power module
Rancangan High Horsepower
Rancangan high horsepower juga tersedia dengan arus pengenal sampai dengan 14.000 ampere. Drive tersebut mempunyai tegangan pengenal sampai dengan 700 VAC dan dapat mengoperasikan motor dengan armature pengenal sampai dengan 750 VDC.

Gambar 5.2 Rancangan high horsepower
5.2 Merubah AC ke DC
Thyristor
Fungsi utama DC drive adalah merubah tegangan AC ke tegangan DC yang bervaiasi. Tegangan DC yang bervariasi debutuhkan untuk mengendalikan kecepatan motor DC. Thyristor adalah salah satu jenis perangkat yang umum digunakan untuk merubah AC ke DC. Thyristor terdiri dari anoda, katoda dan gate.
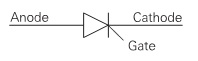
Gambar 5.3 Simbol thyristor
Thyristor bekerja seperti saklar, thyristor akan mengontak ketika anoda positif sehubungan dengan katoda dan terdapat arus positif pada gate. Nilai arus gate yang dibutuhkan untuk mengaktifkan thyristor bervariasi. Thyristor kecil hanya membutuhkan beberapa milliampere, sedangkan thyristor yang besar mungkin membutuhkan ratusan milliampere.
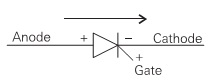
gambar 5.4 Prinsip kerja thyristor
Holding Current
Holding current merujuk pada nilai arus yang mengalir dari anoda ke katoda untuk menjaga thyristor aktif. Arus gate dapt dihilangkan ketika thyiristor telah aktif. Thyristor akan terus mengontak selama anoda tetap positif sehubungan dengan katoda untuk memungkinkan holding current yang cukup tetap mengalir. Sama seperti arus gate, holding current bervariasi tergantung ukuran perangkatnya.
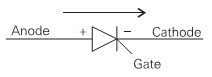
gambar 5.5 Holding current
Thyristor akan mati ketika anoda tidak lagi positif sehubungan dengan katoda.

Gambar 5.6 Thyristor mati
Perubahan AC ke DC
Thyristor menyediakan metode untuk merubah tegangan AC ke tegangan DC yang variabel yang digunakan untuk mengatur kecepatan motor. Pada contoh ini, gate diterapkan sesaat ketika tegangan input AC ketika gelombang sinus pada posisi atas. Thyristor akan mengontak sampai gelombang sinus input memotong nol. Pada titik ini anoda tidak lagi positif sehubungan dengan katoda dan thyristor akan mati. Hasilnya setengan gelombang DC.
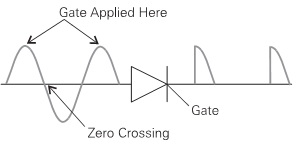
Gambar 5.7 Setengah gelombang DC
Nilai tegangan DC yang disearahkan dapat dikendalikan oleh waktu. Menerapkan arus pada gate ketika awal gelombang sinus menghasilkan tegangan lebih tinggi ke motor. Menerapkan arus pada gate ketika akhir gelombang sinus menghasikan tegangan lebih rendah ke motor.
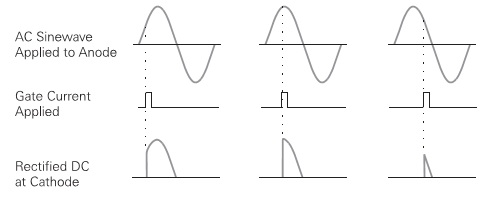
Gambar 5.8 Tegangan DC yang disearahkan terhadap gelombang sinus AC
Converter DC Drive
Output dari satu thyristor tidak cukup halus untuk mengendalikan tegangan pada motor. Enam thyristor disambung secara bersamaan untuk membentuk jembatan penyearah 3Ø.
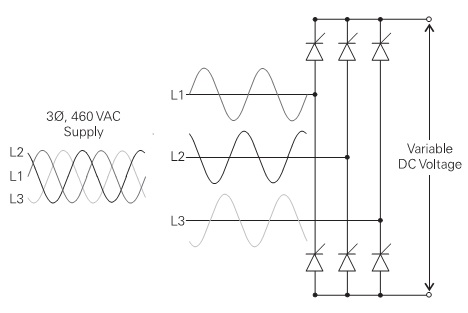
Gambar 5.9 Jembatan penyearah 3Ø
Sudut Buka
Sudut buka pada thyristor yang berhubungan dengan pasokan tegangan AC menentukan seberapa besar tegangan DC yang tersedia. Tetapi nilai positif dan negatif pada gelombang sinus AC harus dipertimbangkan ketika bekerja dengan penyearah penuh 3Ø.
Formula sederhana dapat digunakan untuk menghitung nilai tegangan DC yang disearahkan pada jembatan 3Ø. Tegangan DC yang diubah (Vdc) sama dengan 1.35 dikali nilai RMS pada tegangan input (Vrms) dikali cosinus sudut phasa (cosα)
Vdc = 1.35 x Vrms x cosα
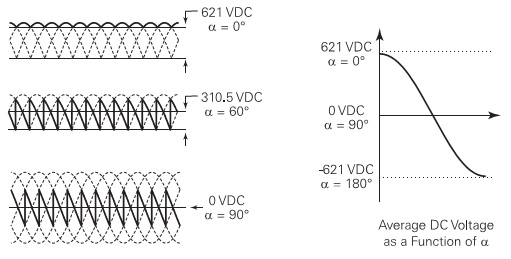
Nilai tegangan DC yang dapat diketahui dari tegangan input 460 VAC adalah -621VDC sampai +621VDC. tabel dibawah ini menunjukan contoh nilai tegangan DC yang disearahkan dari 0° sampai 180°. Tegangan yang diterapkan ke armature tidak boleh melebihi nilai pengenal motor DC.
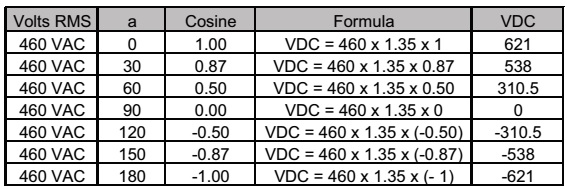
Ilustrasi dibawah ini output gelombang dari jembatan thyristor penuh dari 0°, 60° dan 90°. Nilai DC diindikasikan oleh garis horisontal tebal. Ketika thyristor diaktifkan pada 90° tegangan DC sama dengan nol. Ini karena thyristor mengontak pada waktu yang sama dalam jembatan positif dan negatif. Tegangan DC akan meningkat dalam arah negatif ketika sudut gate (α) meningkat dari 90° ke maksimum 180°.
Gambar 5.10 Gelombang tegangan DC pada jembatan penyearah penuh
5.3 Prinsip Kerja DC Drive
Jembatan thyristor adalah teknik umum yang digunakan untuk mengendalikan kecepatan motor DC. Contoh bagaimana jembatan penyearah DC bekerja akan kita diskusikan.
Sebagai catatan penting, bahawasanya tegangan yang diterapkan ke motor DC tidak boleh melebihi dari pengenal nameplatenya. Control logic pada drive harus diatur untuk membatasi tegangan DC nya. Begitu juga dengan shunt field harus dibatasi sesuai dengan pengenal nameplatenya.
Prinsip Kerja Dasar
DC drive memasok tegangan ke motor untuk bekerja pada keceptan yang diinginkan. Motor menarik arus dari catu daya proporsional dengan torsi (beban) yang diterapkan pada shaft motor.
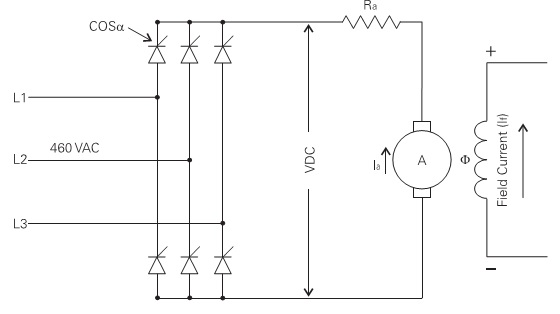
Gambar 5.11 Skema dasar DC Drive
Kecepatan 100%, Beban 0%
Pada contoh ini motor tanpa beban disambung ke DC drive yang sedang bekerja pada kecepatan 100%. Nilai arus armature (Ia) dan motor tanpa beban yang harus bekerja dapat diabaikan. Untuk tujuan penjelasan digunakan arus 0 ampere.
Dc drive akan hanya memasok tegangan yang dibutuhkan agar motor bekerja pada keceptan 100%. Kita telah membahas nilai tegangan yang dikontrol oleh sudut gate pada thyristor. Dalam contoh ini digunakan 450 VDC. Motor berakselerasi sampai CEMF mencapai nilai dari Va-IaRa. Ingat bahwasanya Va = IaRa + CEMF. Pada contoh ini IaRa adalah 0, oleh karena itu CEMF akan mendekati 450 VDC.
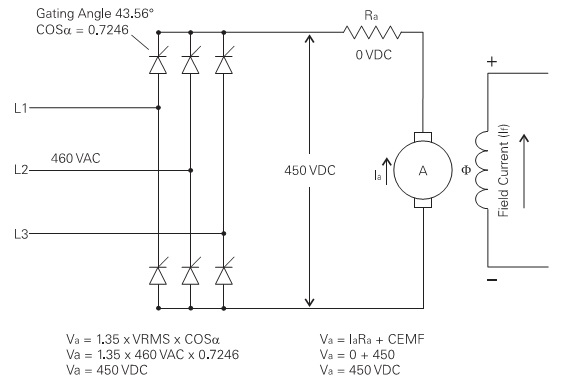
Gambar 5.12 Prinsip kerja DC drive pada kecepatan 100% dan beban 0%
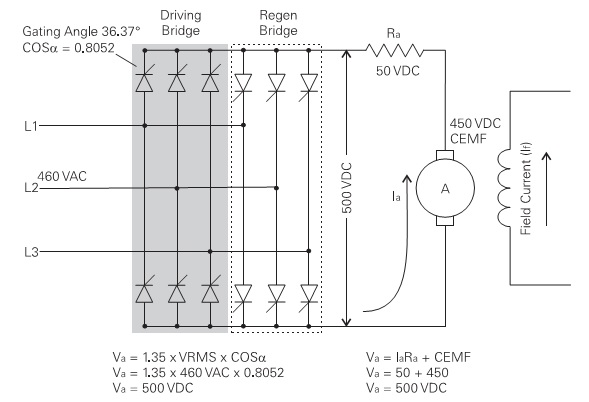
Kecepatan 100%, Beban 100%
Motor dengan beban penuh membutuhkan arus armature 100% pada kecepatan 100%. Arus yang mengalir melalui sirkuit armature akan menyebabkan tegangan turun terhadap resistansi armature (Ra). Tegangan penuh (500 VDC) harus diterapkan ke motor dengan beban penuh agar dapat bekerja pada kecepatan 100%. Untuk menyelesaikan ini, thyristor di buka lebih cepat pada gelombang sinus (36,37°).
DC drive akan memasok tegangan yang dibutuhkan agar motor bekerja pada kecepatan 100%. Motor berakselerasi sampai CEMF mencapai nilai Va-IaRa. Ingat bahwasanya Va=IaRa + CEMF. Pada contoh ini arus armature 100% dan Ra akan menurunkan beberapa nilai tegangan. Jika kita mengasumsikan arus dan resistansi pada Ra menurunkan 50VDC, CEMF akan menjadi 450 VDC.
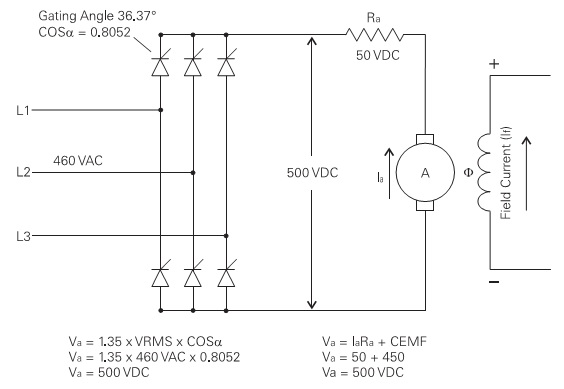
Gambar 5.13 Prinsip kerja DC drive pada kecepatan 100% dan beban 100%
1 Quadran dan 4 Quadran
Sampai titik ini kita hanya berdiskusi pada prinsip kerja drive single quadran. DC drive single quadran mempunyai 6 thyristor.
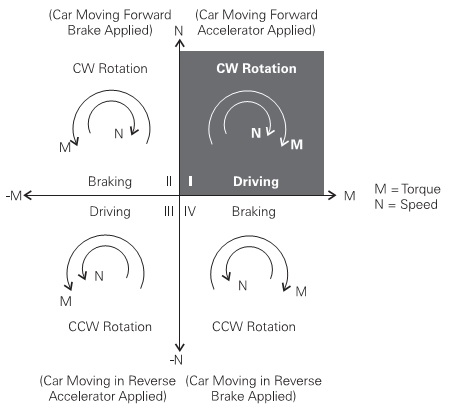
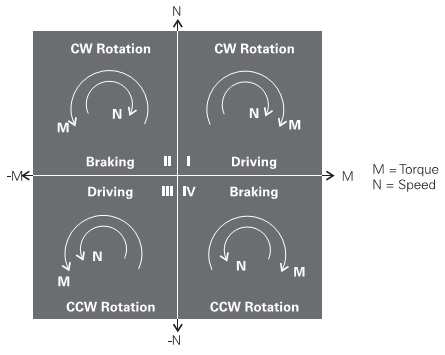
Pada kurva kecepatan/torsi ada prinsip kerja 4 qudran pada arah putaran dan arah torsi. DC drive 4 quadran memiliki 12 thyristor.
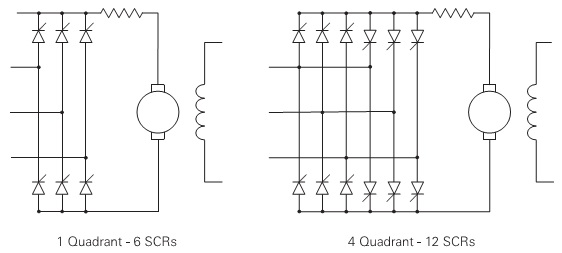
Gambar 5.14 Dc drive 1 quadran dan 4 quadran
Prinsip Kerja DC Drive Single Quadran
DC drive single quadran hanya bekerja pada quadran I. Torsi (M) motor dibuat pada arah depan atau searah jarum jam (CW) untuk mengendalikan motor pada kecepatan (N) yang dibutuhkan. Ini sama dengan mengendarai mobil maju pada jalanan datar dari diam menuju kecepatan yang diinginkan. Melaju kedepan membutuhkan torsi motoring untuk mempercepat mobil dari kecepatan nol sampai mencapai kecepatan yang diinginkan. Ketika mobil mencapai kecepatan yang diinginkan, kaki anda dapat diangkat dari pedal gas sedikit. Ketika mobil menanjak, kita dapat menambahkan sedikit gas untuk menjaga mobil tetap pada kecepatannya. Untuk memperlambat atau menghentikan motor dalam quadran I, drive membiarkan motor untuk berhenti dengan sendirinya.
Gambar 5.15 Grafik single quadran
Merubah Arah Putaran Motor DC
Ada dua cara untuk merubah arah putaran motor DC yaitu :
- Membalik polaritas armature
- Membalik polaritas field
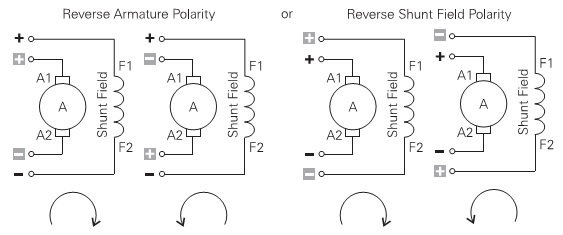
Gambar 5.16 Merubah arah putaran motor DC
Menghentikan Motor pada DC Drive Single Quadran
Menghentikan motor pada single quadran dapat dilakukan dengan mudah yaitu dengan menghilangkan tegangan ke motor dan membiarkan motor untuk berhenti dengan sendirinya. Cara lain, tegangan dapat dikurangi secara bertahap sampai motor berhenti. Waktu yang dibutuhkan untuk menghentikan motor tergantung pada inersia motor dan beban yang disambung ke motor. Semakin besar inersia semakin lama waktunya.
Dynamic Braking
Dynamic braking sering digunakan pada drive single quadran agar motor dapat berhenti dengan cepat. Dynamic braking tidak direkomendasikan untuk kerja yang terus menerus atau berulang-ulang.
Dynamic braking membuat torsi untuk menghentikan dengan menggunakan kontak (Maux) yang dihubungkan ke resistor (Rdb) melalui terminal armature setelah controller drive mematikan power ke motor. Field tetap energize untuk memasok torsi untuk menghentikan motor. Ini dikarenakan torsi (M) motor terganung pada arus armature (Ia) dan flux field.
Arus armature (Ia) membalik arah dan motor bekerja seperti generator. Pembalikan arus armature (Ia) menghasilkan pembalikan torsi yang diterapkan ke motor. Torsi yang saat ini diterapkan pada arah yang berlawanan akan bekerja seperti rem terhadap motor. Energi yang disimpan pada motor yang berputar diterapkan ke resistor dan dirubah menjadi panas. Ukuran resistor harus dapat menangani 150% aliran arus sesaat. Tegangan armature menurun saat motor melambat, menjadikan arus berkurang ke resistor. Akhirnya motor berhenti karena torsi frictional pada beban yang disambung ke motor.
Gambar 5.17 Dynamic braking
Prinsip Kerja DC Drive 4 Quadran
Beban yang dinamis membutuhkan kerja 4 quadran. Jika tegangan motor tiba-tiba dikurangi, torsi negatif akan dibuat dalam motor karena inersia beban yang disambung ke motor. Motor bekerja seperti generator dengan merubah daya mekanik dari shaft ke daya listrik yang dikembalikan ke drive. Ini sama dengan mengendarai mobil pad jalanan menurun. Mesin mobil akan bertindak sebagai rem. Pengereman terjadi pada quadran II dan IV.
Gambar 5.18 Grafik 4 quadran
Regen
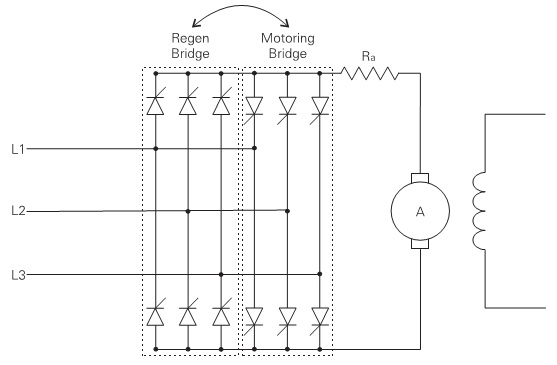
Agar drive dapat bekerja pada semua quadran, harus ada fitur yang menangani energi listrik yang dikembalikan oleh motor. Energi listrik yang dikembalikan oleh motor ke drive dapat menaikan tegangan DC nya dan dapat terjadi kelebihan tegangan yang menyebabkan kerusakan pada drive. Salah satu metode untuk mendapatkan kerja 4 quadran dari DC drive adalah dengan menambahkan jembatan kedua yang disambung berlawanan dari jembatan pertama. Jembatan kedua mengembalikan energi yang berlebih dari motor ke saluran AC. Proses ini disebut juga sebagai regen.
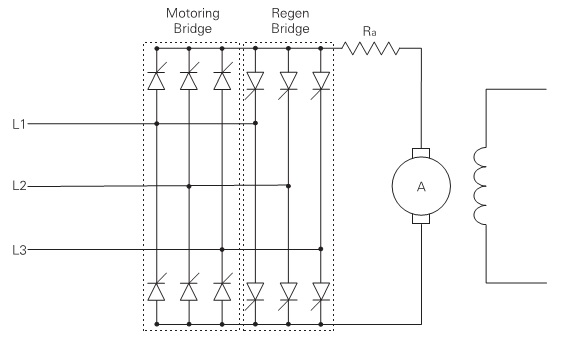
Gambar 5.19 Konfigurasi 4 quadran
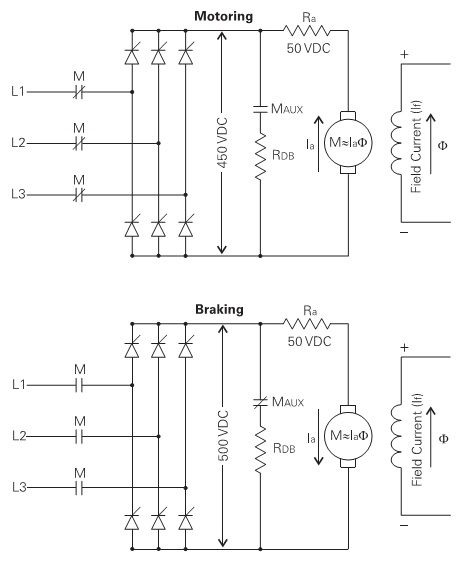
Motoring
Motor menerima daya dari saluran masuk. Pada contoh ini motor bekerja pada kecepatan penuh (500 VDC).
 Gambar 5.20 Motoring
Gambar 5.20 Motoring
Keepatan 100%, Beban -100%
Ketika motor dibutuhkan untuk berhenti secara cepat, jembatan motoring mati dan jembatan regen aktif. Karena inersia awal pada beban yang disambung, motor bekerja seperti generator, mengubah daya mekanik menjadi daya elektrik yang dikebalikan ke saluran AC. Tegangan IaRa turun (-50 VDC) pada polaritas yang berlawanan ketika drive memasok daya motoring. Control logic membuka thyristor jembatan regen pada sudut 130° dan menghasilkan tegangan 400 VDC jembatan dalam polaritas yang berlawanan. Karena polaritas jembatan regen berlawanan, tegangan yang diterapkan kemotor bertindak seperti rem elektrikal.
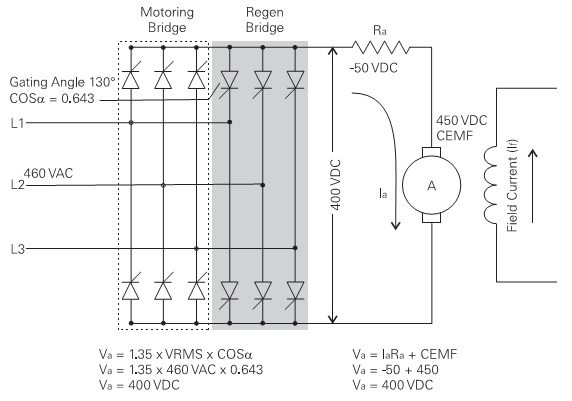
Gambar 5.21 Kecepatan 100% dan beban -100%
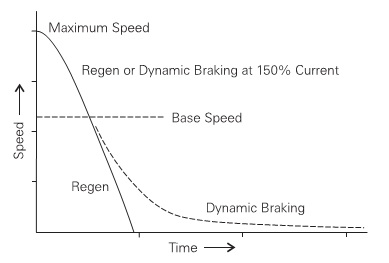
Regen VS Dynamic Braking
Regen dan dynamic braking menyediakan nilai yang sama pada daya pengereman untuk memperlambat motor dari kecepatan maksimum dalam field weakening ke kecepatan dasar. Ini dikarenakan kekuatan field meningkat sampai motor mencapai kecepatan dasar. Tetapi, dari keceptan dasar sampai berhenti, regen mampu memperlambat motor lebih cepat dan juga regen dapat membuat torsi pada kecepatan nol agar motor benar-benar berhenti.
Keuntungan lain dari regen adalah pengereman regen tidak terbatas pada siklus (dapat dipakai terus menerus) dan periode pendinginan (braking resistor dapat menimbulkan panas). Aplikasi yang sering membutuhkan pengereman harus mempertimbangkan untuk memakai 4 quadran dengan pengeraman regen.
Gambar 5.22 Kurva perbandingan regen dengan dynamic braking
Membalik Arah Putaran 4 Quadran
Drive 4 quadran sangat mudah untuk membalik putaran motor DC dengan menerapkan tegangan armature pada polaritas terbalik. Ini dapat diselesaikan dengan menggunakan jembatan regen. Jembatan yang tadinya digunakan drive untuk arah putaran kedepan menjadi jembatan regen.
Gambar 5.23 Membalik arah putara pada drive 4 quadran
5.4 Papan Elektronik
Sampai titik ini kita hanya melihat pada komponen power DC drive untuk mengendalikan kecepatan motor DC. Pengendalian komponen tersebut dikerjakan oleh perangkat keras elektronik dan teknologi perangkat lunak.
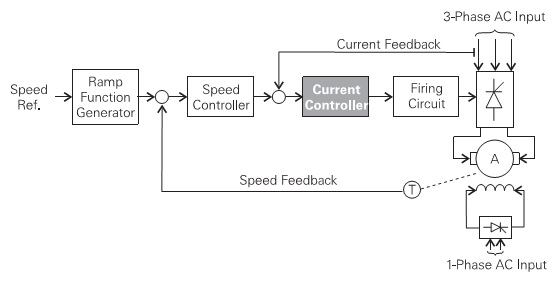
Pengendalian Kecepatan dengan Feedback CEMF
Pengendalian kecepatan adalah salah satu mode kerja. Drive akan berusaha untuk menjaga kecepatan supaya tetap konstan tanpa memperhatikan beban torsi. Referensi kecepatan adalah input ke fungsi ramp yang menerapkan tegangan referensi ke controller kecepatan dengan waktu yang telah ditentukan. Ini memungkinkan percepatan dilakukan dengan lembut. Output dari controller kecepatan diarahkan ke sirkuit firing, yang mengendalikan nilai tegangan yang diterapkan ke armature.
Formula Va = IaRa + CEMF berlaku. IaRa proporsional terhadap beban dan umumnya 10% dari tegangan armature nameplate pada beban 100%. Karena itu, ketika arus/torsi beban bervariasi antara 0% dan 100%, IaRa bervariasi dari 0 sampai 50VDC untuk armature 500 VDC.
Va dan Ia selalu dimonitor. Ra diukur ketika comissioning dan tuning drive. karena Va, Ia dan Ra adalah nilai yang dapat diketahui, CEMF (Ea) dapat dikalkulasi secara tepat. CEMF proporsional terhadap keceptan dan controller kecepatan menggunakan nilai ini untuk menghitung kecepatan aktual. Pengendalian kecepatan dengan feedback CEMF hanya dapat digunakan pada aplikasi dimana motor bekerja dikecepatan antara 0 dan kecepatan dasar.
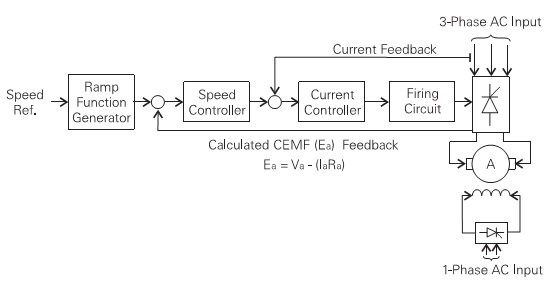
Gambar 5.24 Diagram Pengendalian kecepatan dengan feedback CEMF
Pengendalian Kecepatan dengan Feedback Tacho
Tachometer dapat digunakan ketika pengukuran kecepatan membutuhkan nilai yang akurat atau ketika motor akan bekerja diatas kecepatan dasar. pengukuran kecepatan aktual dikembalikan ke controller kecepatan. Controller kecepatan akan membuat pengaturan tegangan armature untuk menjada kecepatan tetap konstan dengan beban yang bervariasi. Jika tiba-tiba beban meningkat motor akan melambat, menurunkan feedback kecepatan. Controller kecepatan akan mengluarkan sinyal yang lebih tinggi ke controller arus yang akan meningkatkan sudut firing ke sirkuit firing. Hasilnya tegangan armature meningkat memnberikan torsi yang lebih ke motor untuk menangani beban yang meningkat. Kecepatan motor akan meningkat sampai kecepatan aktual sama dengan kecepatan setpoint.
Ketika motor berputar lebih cepat dari kecepatan setpoint, tegangan armature dikurangi. Pada DC drive 4 quadran, tegangan dapat dibalik sesaat untuk memperlambat motor. Tacho DC menyediakan tingkat presisi kira-kira 0.10 – 2% . Tacho digital (pulse) menyediakan tingkat presisi 0.01%. Nilai tersebut tergantung pada tacho dan kondis kerja.
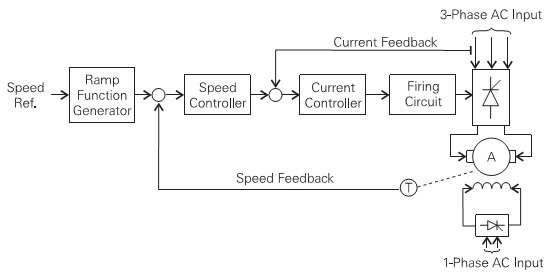
Gambar 5.25 Pengendalian kecepatan dengan feedback tacho
Pengukuran Arus
Drive memonitor arus, yang ditambahkan dengan sinyal kendali kecepatan pada controller arus. Drive bertindak untuk menjaga arus sesuai nameplate atau dibawah nya dengan menurunkan tegangan armature yang diperlukan. Hasil ini akan menurunkan kecepatan sampai penyebab overcurrent dihilangkan.
Gambar 5.26 Pengukuran arus
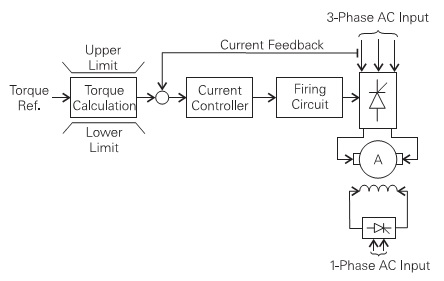
Pengendalian Torsi
Beberapa aplikasi membutuhkan motor untuk bekerja dengan torsi yang telah ditentukan tanpa memperhatikan kecepatan. Feedback kecepatan dihilangkan dan referensi torsi sebagai input. Controller arus secara efektik mengendalikan torsi karena torsi proporsional dengan arus.
Gambar 5.27 Pengendalian torsi
Tuning Drive
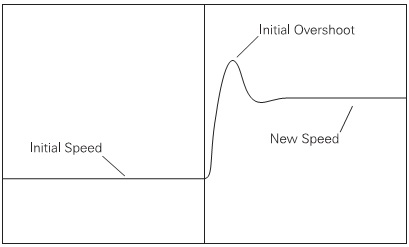
DC drive modern mempunyai fitur self tuning atau auto tuning. Tuning yang tidak tepat dapat menghasilkan overshoot kecepatan yang berlebihan ketika berubah dari satu kecepatan ke kecepatan lain. Osilasi dapat terjadi yang berkontribusi terhadap ketidakstabilan sistem.

Gambar 5.28 Tuning kecepatan yang tidak baik
Tuning yang baik akan mempunyai overshoot awal kira-kira 43% dan mencapai kecepatan yang sesuai dengan cepat. Ini menyediakan kestabilan sistem dengan respon yang cepat.
Gambar 5.29 Tuning kecepatan yang baik
Beberapa drive mempunyai fitur auto tune untuk menyesuaikan kinerja drive terhadap motor dan beban. Fitur auto tune tersebut antara lain :
- Pre-control dan controller arus untuk armature dan field
- Controller kecepatan
- Field weakening
- Friction dan kompensasi inersia
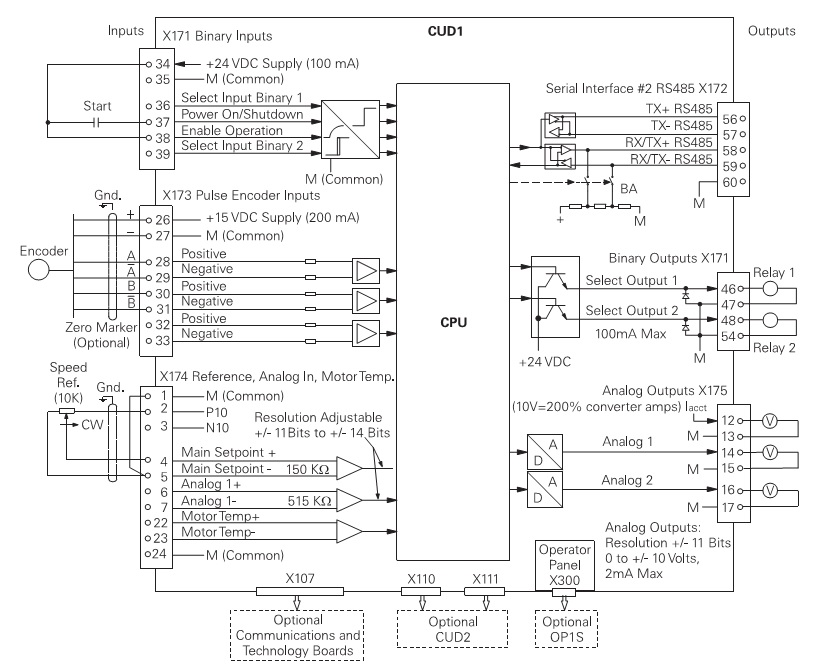
Papan Kendali
Papan kendali adalah papan utama pada drive. Papan ini memiliki perangkat lunak dan antarmuka perangkat keras untuk mengoperasikan drive dalam kendali kecepatan atau torsi. Papan ini mempunyai koneksi input dan output untuk pengkabelan perangkat kontrol separti tombol start/stop dan potentiometer kecepatan.
Beberapa DC drive, binary output dapat diprogram untuk mengindikasikan kondisi drive. Beberapa binary input juga dapat diprogram untuk fungsi reverse atau jog. Analog input juga tersedia untuk referensi kecepatan. Analog output disediakan untuk indikasi pengukuran seperti arus, kecepatan atau tegangan. Terminal untuk suhu motor dapat juga dihubungkan dan digunakan untuk menghentikan drive jika motor dalam kondisi panas yang berlebihan. Beberapa drive menerapkan feedback kecepatan seperti tacho DC dan tacho digital (encoder) sebagai option tapi ada juga yang sudah tertanam dalam papan utama.
Gambar 5.30 Contoh papan elektronik utama pada Siemens DC drive
Programming
DC drive dapat diprogram dan dioperasikan dari berbagai sumber, seperti keypad, handheld ataupun menggunakan perangkat lunak melalui port serial.
Keypad dapat dipasang secara langsung pada drive. Parameter seperti ramp, kecepatan minimum dan maksimum dan mode operasi dapat diatur dari keypad.
Komunikasi
DC drive modern menyediakan beberapa opsi protokol komunikasi yang dapat digunakan untuk berkomunikasi dengan PLC, HMI dan lain-lain. Opsi komunikasi yang tersedia yaitu Profibus DP, CAN, DeviceNet, modbus, dan lain-lain. Papan komunikasi ini merupakan opsi yang dapat dipasang langsung ke drive.
Untuk menjaga instalasi dan upaya pengkabelan, pertukaran data harus dibuat melalui fieldbus. Pengkabelan sinyal individual tidak lagi praktis dikarenakan kuantitas semata. Tujuan dari pengembangan fieldbus dapat meningkatkan pertukaran sinyal dan data.
5.5 Aplikasi
Ketika menggunakan DC drive dan motor DC pada sebuah aplikasi, harus diketahui karateristik horsepower, torsi dan kecepatan dari bebannya. Grafik berikut ini menunjukan karateristik umum dari berbagai beban.
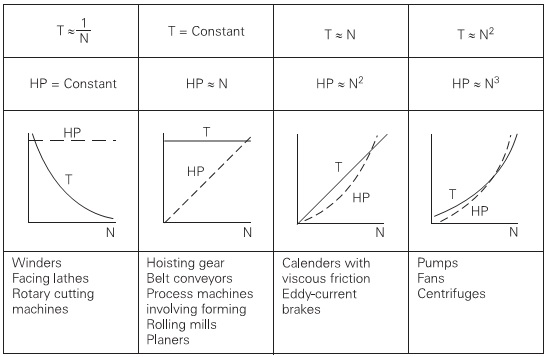
Gambar 5.31 Grafik karateristik beban
Beban umumnya dibagi menjadi 3 kategoti :
- Konstan torsi : beban dasarnya sama diseluruh rentang kecepatan. Contoh nya hoist dan belt conveyor.
- Variabel torsi : beban meningkat ketika kecepatan meningkat. Contoh nya pompa dan fan.
- Konstan horsepower : beban menurun ketika kecepatan meningkat. Contoh nya winder dan mesin rotary cutting.
Winder
Motor DC menawarkan karateristik yang baik pada kecepatan rendah untuk operasi winder. Pada aplikasi winder, menjaga tension pada saat diam sangat penting. Motor DC menawarkan rentang kecepatan yang luas pada torsi pengenalnya. Pada kebanyakan aplikasi winder yang bekerja pada kecepatan diatas rentangnya, motor DC dengan horsepower kecil dapat melakukan hal yang sama dengan motor DC yang besar.
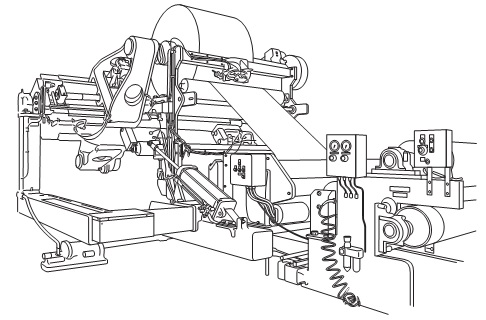
Gambar 5.32 Aplikasi winder
Crane/Hoist
Motor DC menawarkan beberapa keuntungan pada aplikasi yang bekerja pada kecepatan rendah seperti crane dan hoist. Keuntungannya yaitu akurasi kecepatan rendah, kemampuan short-time overload, ukuran, torsi dan load sharing.
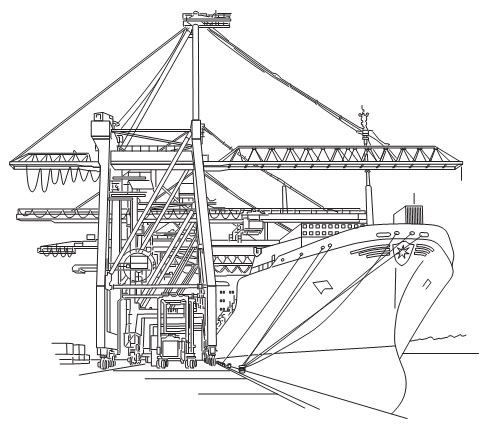
Gambar 5.33 Aplikasi crane/hoist
Referensi :
- Siemens Basic DC Drive
- Electrical Drive : Principal-Planning-Application-Solution, Jens Weidauer & Richard Messer
Leave a Comment