3.1 Dasar AC Drives
AC drives, inverters dan adjustable frequency drives adalah istilah yang digunakan untuk menyebut perangkat yang dirancang untuk mengatur kecepatan motor AC. AC drive menerima daya AC dan merubahnya menjadi frekuensi dan tegangan yang dapat disesuaikan untuk mengendalikan motor. Umumnya inverter menerima 480 VAC, 3-phase, 60 Hz daya masuk dan memberikan tegangan dan frekuensi yang tepat untuk mengatur kecepatan motor. Jenis inverter yang umum adalah VVI (variable voltage inverter), CSI (current source inverter) dan PWM (pulse width modulation). Jenis lain dari AC drive adalah cycloconverter, yang umumnya digunakan untuk motor yang sangat besar. Semua AC drive merubah AC ke DC dan kemudian melalui teknik switching membalikan DC menjadi output tegangan dan frekuensi yang varibel.
VVI
VVI (variable voltage inverter) menggunakan SCR converter bridge untuk mengubah tegangan AC masuk ke DC. SCR menyediakan sarana untuk mengendalikan tegangan DC dari 0 hingga sekitar 600 VDC. Choke L1 dan kapasitor C1 membentuk bagian DC link dan menghaluskan tegangan DC yang diubah. bagian inverter terdiri dari 6 peralatan switching. Berbagai peralatan dapat digunakan seperti thyristor, bipolar transistor, MOSFETS dan IGBT. Skema dibawah ini menunjukan inverter yang memakai bipolar transistor. Kontrol logika menggunakan microprocessor untuk mengendalikan transistor on dan off, menyediakan tegangan dan frekuensi yang variabel ke motor.
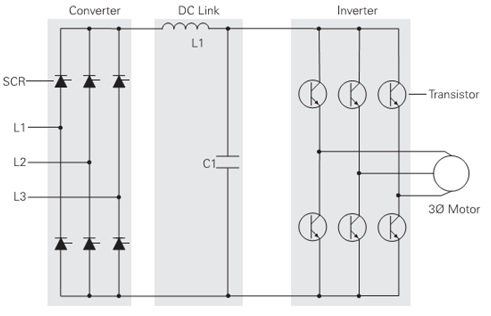
Gambar 3.1 Skema daya VVI
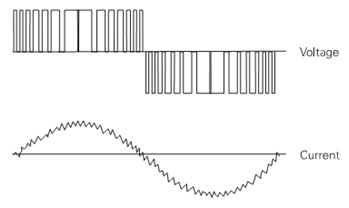
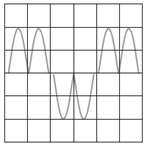
Jenis switching ini sering disebut sebagai six-step karena memerlukan enam 60°-steps untuk menyelesaikan satu putaran 360°. Meskipun motor lebih memilih gelombang sinus yang halus, output six-step dapat digunakan dengan memuaskan. Kekurangan utamanya adalah pulsasi torsi yang terjadi setiap kali peralatan switching diaktifkan. Pulsasi dapat terlihat pada kecepatan rendah karena variasi kecepatan pada motor. Variasi kecepatan ini kadang-kadang disebut sebagai cogging. Gelombang arus non-sinusoidal menyebabkan panas pada motor.

Gambar 3.2 Gelombang arus non-sinusiodal
CSI
CSI (current source inverter) menggunakan SCR untuk menghasilkan tegangan variabel DC link. Bagian inverter juga menggunakan SCR untuk switching output ke motor. CSI menegendalikan arus dalam motor. Motor harus cocok dengan drive.
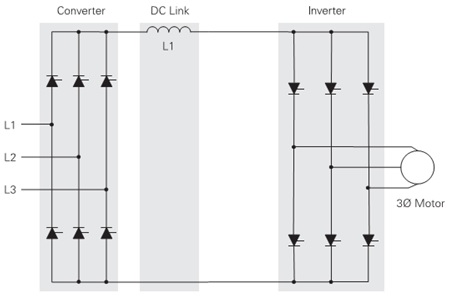
Gambar 3.3 Skema daya CSI
Spike arus, disebabkan oleh switching, dapat dilihat pada output. Pada kecepatan rendah pulsa arus dapat menyebabkan motor cogging.
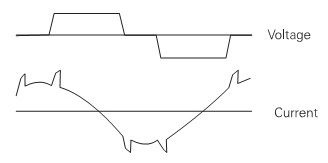
Gambar 3.4 Spike arus
PWM
Drive PWM (pulse width modulation) menyediakan arus output yang lebih sinusoidal untuk mengendalikan frekuensi dan tegangan ke motor AC. Drive PWM lebih efisien dan umumnya menyediakan kinerja tingkat tinggi. Dasar drive PWM terdiri dari converter, DC link, control logic dan inverter.
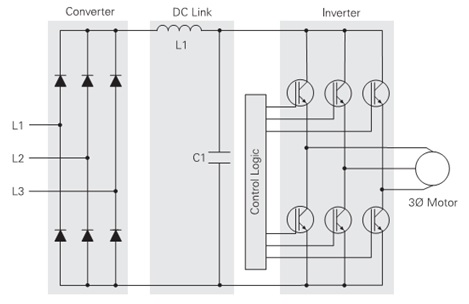
Gambar 3.5 Skema drive PWM
Bagian converter terdiri dari dioda bridge rectifier yang mengubah tegangan AC ke DC. Choke L1 dan kapasitor C1 menghaluskan tegangan DC yang diubah. Nilai DC yang disearahkan sekitar 1.35 kali dari tegangan masukan. Nilai DC yang disearahkan sekitar 650 VDC untuk pasokan 480 VAC.
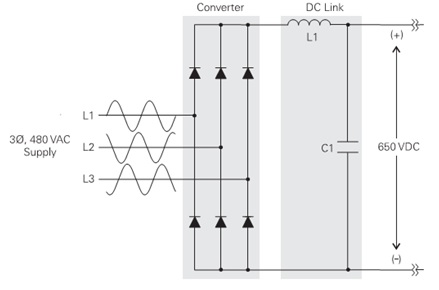
Gambar 3.6 Bagian converter drive PWM
Tegangan dan frekuensi output ke motor dikendalikan oleh bagian control logic dan inverter. bagian inverter terdiri dari enam peralatan switching. Berbagai peralatan seperti thyristor, bipolar transistor, MOSFETS dan IGBT dapat digunakan. Skema dibawah ini menunjukan inverter yang menggunakan IGBT. Control logic menggunakan microprocessor untuk switching IGBT on atau off menyediakan tegangan dan frekuensi variabel ke motor.
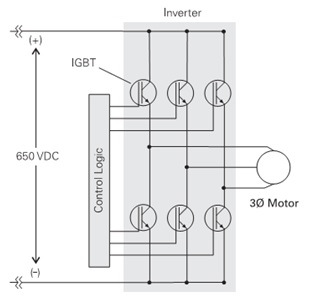
Gambar 3.7 Bagian inverter pada drive PWM
IGBT (insulated gate bipolar transistor) menyediakan switching kecepatan tinggi yang diperlukan untuk operasi inverter PWM. IGBT mampu switch on kurang dari 400 nanodetik dan off kira-kira 500 nanodetik. IGBT terdiri dari gate, collector dan emitter. Ketika tegangan positif (umumnya +15 VDC) siterapkan ke gate IGBT akan aktif. Arus akan mengalir antara collector dan emitter. IGBT akan mati dengan menghilangkan tegangan positif dari gate. Selama keadaan off, tegangan gate IGBT biasanya ditahan pada tegangan negatif kecil (-15 VDC) untuk mencegah perangkat agar tidak on.

Gambar 3.8 IGBT
Menggunakan Peralatan Switching Untuk Membuat Output AC
Pada contoh dibawah ini, output satu phase dari tiga phase digunakan untuk menunjukan bagaimana tegangan AC dapat dibuat. Saklar menggantikan IGBT. Tegangan yang berganti-ganti antara positif dan negatif dibuat dengan membuka dan menutup saklar dalam urutan tertentu. Sebagai contoh, ketika langkah 1 dan 2, A+ dan B- tertutup. Tegangan output antara A dan B adalah positif. Ketika langkah 3, A+ dan B+ tertutup. Potensial yang berbeda dari A ke B adalah nol. Tegangan output adalah nol. Ketika langkah 4, A- dan B+ tertutup. Tegangan output dari A ke B adalah negatif. Tegangan tergantung pada nilai dari tegangan DC dan frekuensi tergantung pada kecepatan switching. Gelombang sinus AC telah ditambahkan ke output (A-B) untuk menunjukan bagaimana AC di simulasikan.
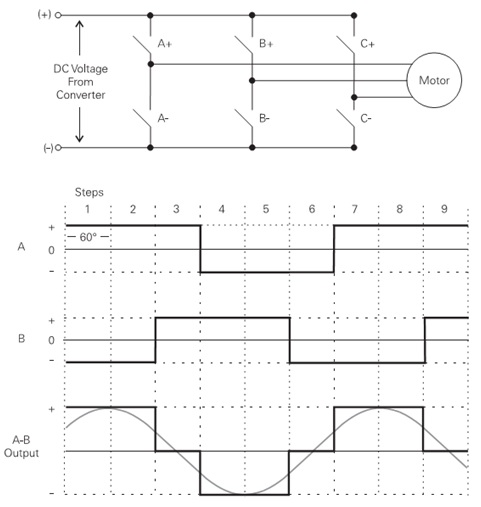
Gambar 3.9 Membuat output AC pada peralatan switching
Output PWM
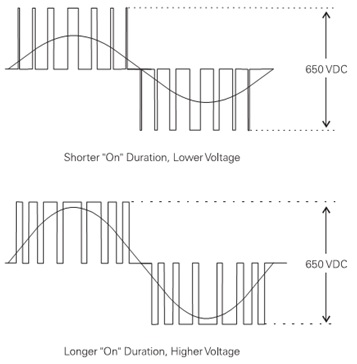
Ada beberapa teknik modulasi PWM. Gambar dibawah ini meneilustrasikan metode PWM yang umum. IGBT (atau peralatan switching jenis lain) dapat diaktifkan untuk menghubungkan motor ke nilai positif dari tegangan DC (650 VDC dari converter). Arus mengalir dalam motor. IGBT dihidupkan untuk waktu singkat, sehingga hanya sejumlah arus kecil yang menumpuk dimotor dan kemudian dimatikan. IGBT dinyalakan dan dibiarkan dalam periode waktu yang semakin lama, memungkinkan arus untuk naik ketingkat yang lebih tinggi hingga arus dimotor mencapai puncak. IGBT kemudian dinyalakan untuk periode waktu yang semakin pendek, mengurangi penumpukan arus dimotor. Gelombang sinus setengah negatif dihasilkan dengan mengaktifkan IGBT yang terhubung ke nilai negatif dari tegangan DC yang konversi.
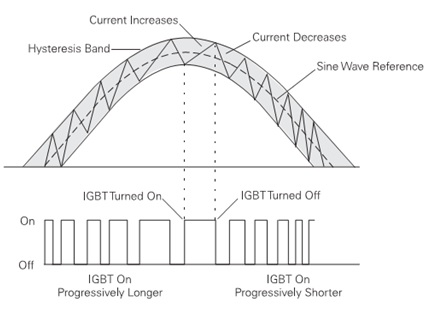
Gambar 3.10 Output PWM
Tegangan dan Arus PWM
Arus output yang lebih sinusiodal dihasilkan oleh PWM mengurangi pulsasi torsi, motor cogging pada kecepatan rendah dan kerugian motor yang terlihat ketika menggunakan output six-step.
Gambar 3.11 Tegangan dan arus PWM
Tegangan dan frekuensi dikendalikan secara elektronik oleh sirkuit dalam AC drive. Tegangan DC (650 VDC) dimodulasi dengan metode ini untuk menyediakan tegangan dan frekuensi yang variabel. Pada output frekuensi rendah, output tegangan rendah dibutuhkan. Peralatan switching dinyalakan untuk waktu yang singkat. Tegangan dan arus yang ada dimotor rendah. Pada output frekuensi tinggi, tegangan tinggi dibutuhkan. Peralatan switching dinyalakan untuk waktu yang lebih lama, memungkinkan tegangan dan arus untuk naik ke tingkat yang lebih tinggi pada motor.
Gambar 3.12 Modulasi tegangan DC
3.2 Fitur AC Drive
Beberapa produsen menawarkan beragam AC drive, dalam satu brand terdapat berbagai variasi tegangan input yang harus disesuaikan dengan aplikasinya. Di masa lalu, dibutuhkan orang yang berpengalaman untuk setup dan commissioning AC drive untuk mencapai operasi yang diinginkan. AC drive modern saat ini mempunyai fasilitas auto tuning untuk kalibrasi motor, flux current control, vector control dan PID regulator loop, yang dikendalikan oleh programmable digital microprocessor dan sifatnya mudah untuk digunakan.
AC drive modern cocok untuk berbagai aplikasi kecepatan vaiabel seperti pompa, fan dan sistem conveyor. Sebagai catatan ada beberapa fitur yang tidak tersedia disetiap AC drive yang berbeda brand.
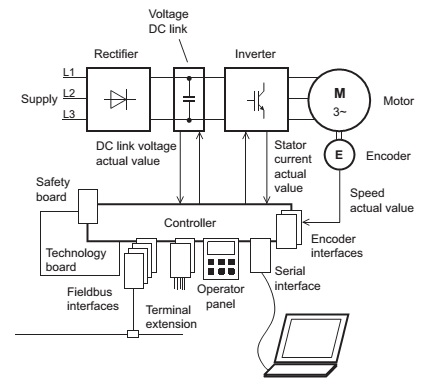
Operator panel digunakan untuk programming dan operasi drive (start, stop, jog dan reverse). Parameter dapat disetting melalui operator panel. Nilai parameter dan satuannya di tampilkan pada display operator panel. Ada juga operator panel yang dapat menyimpan kumpulan parameter sehingga ketika ada pergantian AC drive hanya menyalin parameter dari operator panel ke drive.
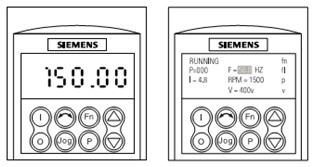
Gambar 3.13 Contol operator panel dari Siemens
Parameter
Parameter adalah variabel yang memberikan nilai konstant. parameter aplikasi standar sudah dipreload dari pabrik, yang cocok untuk berbagai aplikasi. Parameter tersebut secara mudah dapat di modifikasi untuk memenuhi kebutuhan aplikasi. Parameter seperti ramp times, minimum dan maksimum frekuensi dan mode operasi mudah di set menggunakan operator panel.
Ramp function
Fitur AC drive adalah kemampuannya untuk menaikan atau menurunkan tegangan dan frekuensi ke motor secara bertahap. Ini mempercepat motor secara halus dengan mengurangi stress pada motor dan beban yang dihubungkan. Percepatan dan perlambatan dapat diprogram secara terpisah dari 0 sampai 650 detik. Percepatan, dapat di set 10 detik dan perlambatan dapat diset 60 detik.
Smoothing adalah fitur yang dapat ditambahkan ke kurva percepatan/perlambatan. Fitur ini menghaluskan transisi antara ramp awal dan akhir.
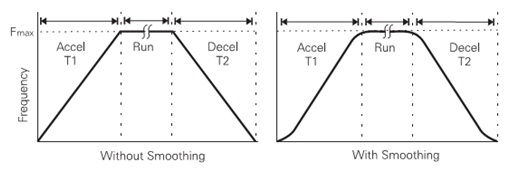
Gambar 3.14 Kurva percepatan/perlambatan menggunakan fitur smoothing
Analog Inputs
AC drive mempunyai beberapa analog input, memungkinkan untuk fungsi PID control loop. PID control loop digunakan dalam process control untuk memotong kecepatan. Sebagai contoh, pengendalian suhu dan tekanan.
Contoh dibawah ini, AIN1 diset sebagai referensi kecepatan motor dari 0 sampai 100%. Terminal 1 adalah catu daya +10 VDC internal drive. Terminal 2 adalah 0 VDC atau ground untuk 10 VDC. Potensio dihubungkan antara terminal 1 dan 2. Terminal 3 adalam analog input positif ke drive. Sebagai catatan, jumper dihubungkan antara terminal 2 dan 4. Analog input tidak bisa dibiarkan terbuka (floating). Drive juga dapat menerima sinyal referensi 0 – 20mA atau 4 – 20mA dengan mengatur dip switch atau secara program pada parameter (tergantung spesifikasi pada drive itu sendiri). Sinyal tersebut biasanya diberikan oleh perangkat lain seperti PLC.
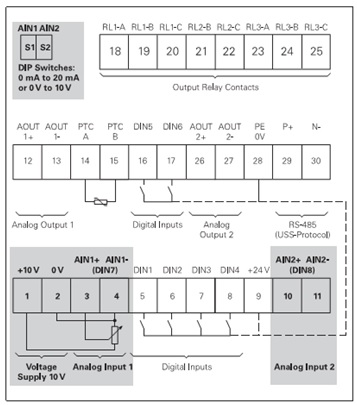
Gambar 3.15 Terminal analog input pada AC drive
Digital Inputs
AC drive juga mempunyai beberapa digital input. Saklar atau kontak dapat dihubungkan antara +24 VDC pada terminal 9 dan digital input. Program standar pabrik menggunakan DIN1 sebagai start/stop. DIN2 digunakan untuk reverse, sementara DIN3 sebagai fault reset. Fungsi lain seperti preset speed dan jog dapat diprogram juga.
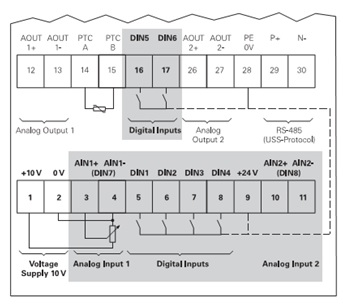
Gambar 3.16 Terminal digital input pada AC drive
Thermistor
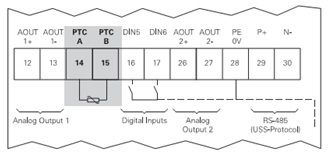
Beberapa motor mempunyai built-in thermistor. Jika motor panas thermistor dapat beraksi untuk mengiterupsi daya ke motor. Jika motor mencapai preset temperature yang diukur oleh thermistor, drive akan menginterupsi daya ke motor. Motor akan berhenti. Display pada operator panel akan menunjukan kesalahan yang terjadi. Berbagai thermistor standard yang dipasang pada motor akan dapat bekerja.
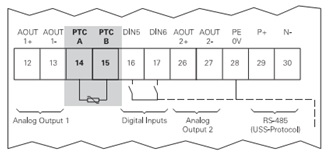
Gambar 3.17 Terminal thermistor pada AC drive
Analog output
Analog output dapat digunakan untuk memantau frekuensi, setpoint frekuensi, tegangan DC-link, arus motor, torsi motor, dan kecepatan motor tergantung pada setting parameter yang diinginkan.
Gambar 3.18 Terminal analog output pada AC drive
Relay output
Relay dapat diprogram untuk mengindikasikan berbagai kondisi seperti drive running, fault, zero-speed dan lain-lain.

Gambar 3.19 terminal relay output pada AC drive
Komunikasi Serial
Beberapa AC drive memepunyai antarmuka serial RS485 yang memungkinkan komunikasi dengan komputer (PC) atau PLC. Standar protokol RS485 yang umum adalah Modbus RTU, ada juga slot untuk tambahan modul komunikasi untuk protokol lain seperti Profibus, Profinet, DeviceNet, Ethernet/IP dan lain-lain.
Gambar 3.20 Antarmuka komunikasi pada AC drive
Current Limit
AC drive mampu memberikan arus 150% dari arus pengenal selama 60 detik atau 200% selama 3 detik. Fungsi pemantauan dan perlindungan juga memuat overcurrent, overload, overtemperature warnign dan overtemperature fault.
Low Speed Boost
Kita telah berdiskusi bahwa hubungan antara tegangan (E), frekuensi (F) dan magnetisasi flux (ɸ). Kita juga telah membahas bahwa torsi (T) tergantung dari magnetisasi flux. Peningkatan tegangan akan menyebabkan peningkatan torsi.
Beberapa aplikasi seperti conveyor membutuhkan torsi lebih untuk start dan mempercepat bebab pada kecepatan rendah. Low speed boost adalah fitu yang memungkinkan tegangan bisa diatur pada kecepatan rendah. Ini akan menaikan/menurunkan torsi. Low speed boost dapat diatur tinggi untuk aplikasi yang membutuhkan torsi tinggi pada kecepatan rendah. Beberapa aplikasi seperti fan, tidak memerlukan torsi yang banyak pada saat start.
Mode Operasi
Beberapa AC drive mempunyai berbagai mode operasi seperti :
- Linear voltage/frquency
- Quadratic voltage/frequency
- Flux Current Control
- Sensorless Vector Frequency Control
- Closed Loop Vector Control
Linear Voltage/Frequency
AC drive dapat beroperasi memenuhi kurva standar V/Hz. Menggunakan motor 460 VAC 60 Hz, V/Hz konstan diberikan kemotor pada frekuensi berapapun antara 0 – 60 Hz. Ini adalah jenis kontrol sederhana dan cocok untuk aplikasi umum.
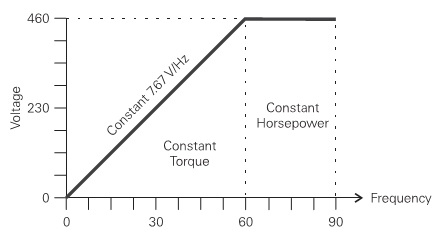
Gambar 3.21 Kurva mode linear voltage/frequency
Quadratic Voltage/Frequency
Mode operasi kedua disebut juga sebagai kurva quadratic voltage/frequency. Mode ini menyediakan kurva V/Hz yang sesuai dengan kebutuhan torsi dari aplikasi fan dan pompa sederhana.
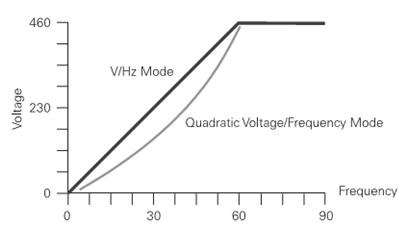
Gambar 3.22 Kurva mode quadratic voltage/frequency
Flux Current Control
Pada mode flux current control, arus stator dibuat dari arus aktif dan reaktif. Komponen arus reaktif dari arus stator menghasilkan medan magnet yang berputar. Arus aktif menghasilkan usaha. Drive menghitung flux medan magnet motor berdasarkan pada arus reaktif stator yang diukur dan data yang dimasukan sesuai nameplate motor. Algoritma komputer internal berusaha untuk menjaga flux medan magnet yang diperkirakan konstan.
Jika informasi nameplate motor telah dimasukan dan drive telah disetup dengan baik, mode flux current control biasanya akan memberikan kinerja dinamik yang lebih baik dari pada mode V/Hz. Flux current control secara otomatis mengadaptasi output drive terhadap beban. Motor selalu beroperasi pada efisiensi optimal. Kecepatan tetap konstan walaupun dalam kondisi beban berbeda.

Gambar 3.23 Kurva mode flux current control
Sensorless Vector Control
Dimasa lalu, respon dinamik motor DC secara umumnya dianggap jauh lebih baik daripada motor AC. Motor AC lebih murah dan membutuhkan perawatan lebih sedikit dari motor DC. Menggunakan model matematika motor yang kompleks dan algoritma kontrol vektor mampu memberikan kontrol yang diperlukan motor AC sehingga kinerjanya sama dengan motor DC. Vector control, flux vector dan field orientation adalah istilah yang menjelaskan teknik kontrol khusus dari AC drive ini.
Sistem vector control memfasilitasi kontrol independen yang merupakan elemen penghasil flux dan penghasil torsi dalam motor induksi. Sensorless vector control menghitung kecepatan rotor pada model motor, CEMF yang dikalkulasi, tegangan output inverter, dan arus output inverter. Hasil ini meningkatkan kinerja dinamis dibanding dengan metode kontrol lain.
Ketika kecepatan motor dikalkulasi pada kecepetan sangat rendah, berdasarkan CEMF yang kecil dan koreksi untuk resistansi stator, sedikit variasi dalam tahanan stator dan parameter lainnya akan berpengaruh pada perhitungan kecepatan. Ini membuat vector control tanpa tachometer tidak praktis dibawah beberapa hertz.
Sensorless vector control akan menghasilkan torsi penuh dibawah beberapa hertz dan torsi 150% atau lebih pada semua kecepatan.
Ada beberapa teknik yang rumit digunakan untuk mencapai torsi kecepatan rendah ini dengan mode sensorless vector control. Pengaturan dan commissioning dari orang yang ahli mungkin diperlukan untuk mencapai operasi yang diinginkan dengan kecepatan rendah.
Parameter untuk static torque, flux adaptation, slip compensation dan konsep lain sangat rumit dan diluar materi ini.
Operasi single-quadrant
Pada chart kecepatan-torsi dibawah ini ada 4 quadran menurut arah putaran dan arah torsi. Drive single-quadrant beroperasi hanya dalam quadrant I atau III. Quadrant I adalah motor maju (CW). Quadrant III adalah motor mundur (CCW). membalik putaran dicapai dengan membalikan arah putaran medan magnet field. Torsi motor dibuat dalam arah positif untuk menangani beban yang dihubungkan pada kecepatan yang diinginkan (N). Ini sama dengan mengemudikan mobil masju pada permukaan datar dari keadaan diam sampai dengan kecepatan yang diinginkan. Dibutuhkan torsi lebih untuk mempercepat mobil dari kecepatan nol ke kecepatan yang diinginkan. Ketika mobil mencapai kecepatannya, kaki anda dapat dilepas dari pedal gas sedikit. Ketika mobil datang ke tanjakan lebih banyak pedal gas ditekan untuk mempertahankan kecepatan.
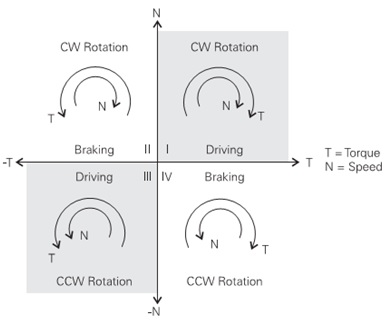
Gambar 3.24 Chart single-quadrant
Coast-to-Stop
Untuk menghentikan motor AC dalam operasi single-quadrant, tegangan dan frekuensi dihilangkan dan motor dimungkinkan untuk berhenti dengan sendirinya. Ini sama dengan meletakan mobil dalam gigi netral, mematikan pengapian dan memungkin kan mobil untuk berhenti dengan sendirinya.
Mengontrol Perlambatan
Cara lain yaitu dengan mengontrol perlambatan. Tegangan dan frekuensi dikurangi secara bertahap sampai motor berhenti. Ini sama dengan melepaskan kaki dari pedal gas secara pelan. Jumlah waktu dibutuhkan untuk menghentikan motor tergantung pada inertia motor dan beban. Inertia lebih besar semakin lama motor akan berhenti.
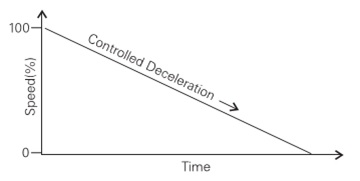
Gambar 3.25 Mengontrol perlambatan
DC Injection Braking
Mode DC injection braking menghentikan medan magnet field yang berputar dan menerapkan tegangan DC konstan ke gulungan motor, membantu menghentikan motor. Samapi dengan arus 250% dari arus pengenal dapat diterapkan. Ini sama dengan melepaskan kaki anda dari pedal gas dan menerapkan rem untuk menghentikan mobil secara cepat.
Compound Braking
Compound braking menggunakan kombinasi dari mengontrol perlambatan dan DC injection braking. Drive memantau tegangan bus selama beroperasi dan mengaktifkan compund braking ketika bus melebihi batas ambang setpoint. Karena motor melambat ke kondisi berhenti, tegangan DC secara periodik diterapkan kegulungan motor. Kelebihan energi di bus hilang di gulungan motor. Ini sama dengan menerapkan rem ke mobil untuk memperlambat kemudian memungkinkan inertia mekanikal mesin untuk melambatkan kendaraan sampai mobil berhenti.
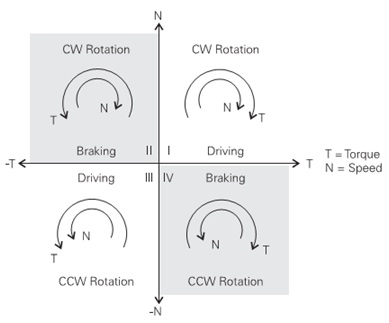
Operasi Four-Quadrant
Dinamika beban tertentu mungkin memerlukan operasi four-quadrant. Ketika dilengkapi dengan braking resistor, AC drive mampu untuk beroperasi four-quadrant. Torsi selalu bertindak agar rotor berputar menuju kecepatan sinkron. Jika kecepatan sinkron tiba-tiba dikurangi, torsi negatif dibuat dalam motor. Motor bertindak seperti generator dengan merubah daya mekanikal dari shaft menjadi daya listrik yang dikembalikan ke AC drive. Ini sama dengan mengemudikan kendaraan menuruni bukit. Mesin mobil akan bertindak seperti rem. Pengereman terjadi dalam quadrant II dan IV.
Gambar 3.26 Chart four-quadrant
Pulsed Braking Resistor
Agar AC drive dapat beroperasi dalam quadrant II atau IV, harus ada cara untuk menangani energi listrik yang dikembalikan ke drive oleh motor. Energi listrik yang dikembalikan oleh motor dapat menyebabkan tegangan dalam DC link menjadi sangat tinggi ketika ditambahkan dengan tegangan masukan. Beberapa komponen drive akan rusak oleh tegangan yang berlebihan ini. Opsi braking resistor tersedia untuk AC drive. Braking resistor dihubungkan pada terminal tertentu pada drive. Braking resistor yang diaktifkan dan dimatikan dari rangkaian oleh IGBT. Energi yang dikembalikan oleh motor terlihat pada DC link. Ketika DC link mencapai batas yang telah ditentukan, IGBT di aktifkan oleh control logic. Kelebihan energi dihilangkan oleh resistor, menurunkan tegangan bus. Ketika tegangan DC link telah dikurangi mencapai tingkat aman, IGBT dimatikan, memutuskan resistor dari DC link. Ini disebut sebagai pulsed resistor braking. Proses ini memungkinkan motor untuk bertindak sebagai rem, melambatkan beban secara cepat.
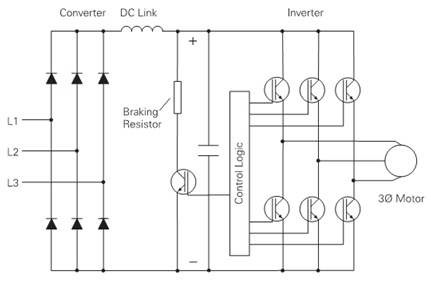
Gambar 3.27 Rangkaian braking resistor
Rectifier Regenerative Front End
Metode lain untuk menghadapi regenerasi yang berlebihan adalah dengan rectifier regenerative front end. Dioda dalam bagian converter digantikan dengan SCR dan regen bridge kedua ditambahkan. Fungsi SCR mirip dengan rectifier diode, kecuali SCR mempunyai kaki gate, yang digunakan untuk mengaktifkan SCR. Ini memungkinkan control logic untuk menegendalikan kapan converter bridge dan regen bridge diaktifkan.
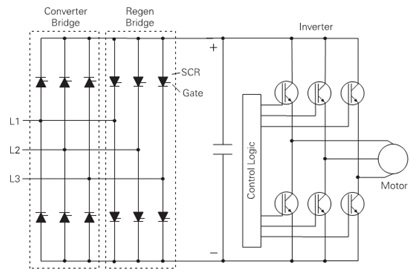
Gambar 3.28 Penambahan regen bridge
Blok diagram sederhana menyediakan gambaran dari proses regen. ketika motor memerlukan energy motoring untuk akselerasi atau menjaga kecapatan terhadap beban inertia, converter bridge diaktifkan. ketika motor dalam mode regenerative, motor bertindak seperi generator, memberikan energi listrik kembali ke DC link. Ketika tegangan DC link mencapai tingkat yang telah ditentukan, motoring SCR dimatikan dan regen SCR diaktifkan.

Gambar 3.29 Proses motoring dan regen
Ini memungkinkan energi yang berlebihan dikembalikan ke saluran AC dalam bentuk arus AC.
Gambar 3.30 Arus yang dikembalikan ke saluran AC selama regeneration
Active Front End
Active Front End (AFE) adalah opsi lain untuk mengendalikan tegangan regenerative. Dengan opsi ini dioda dalam converter bridge digantikan dengan modul IGBT dan Clean Power Filter. IGBT dikendalikan oleh control logic, beroperasi dalam mode motoring dan regenerating.
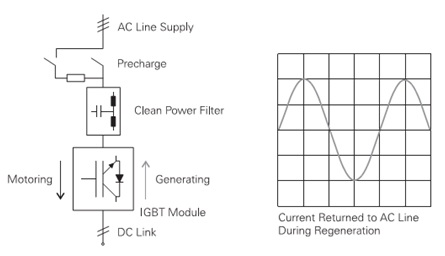
Gambar 3.31 Proses AFE
Harmonic dibuat oleh rangkaian elektronik, seperti beban non linear dari AC drive. Harmonic dapat menyebabkan masalah terhadap beban yang terhubung. Frekuensi dasar dikatakan sebagai harmonic pertama. Harmonic tambahan yang ditumpangkan pada frekuensi biasanya merupakan kelipatan bilangan bulat dari harmonic pertama. Harmonic kelima dari catu daya 60 hz, adalah 300 Hz (60 x 5).
Keuntungan utama dari AC drive yang dilengkapi dengan AFE dan Clean Power Filter adalah keduanya diselaraskan secara optimal satu sama lain untuk menghilangkan harmonic dan menyediakan catu daya yang bersih. Selain itu, AFE memungkinkan untuk produksi KVAR kapasitif yang secara efektif mengkompensasi beban induktif lainnya dalam plant industri. Ini membantu mengurangi tagihan utility.

Gambar 3.32 Chart harmonic
Jarak ke Motor
Semua kabel motor mempunyai kapasitansi. Semakin panjang kabel, semakin besar kapasitansinya. Spike terjadi pada output untuk semua drive PWM karena arus pengisian kapasitansi kabel. Tegangan yang besar (460 VAC) dan kapasitansi besar (kabel yang panjang) menghasilkan spike arus yang besar. Spike tegangan yang disebabkan oleh panjang kabel dapat memperpendek usia inverter dan motor.
jarak maksimum antara motor dan AC drive, ketika kabel unshielded digunakan yaitu 100 meter. Jika kabel shielded digunakan atau kabel dalam metal conduit, jarak maksimumnya 50 meter.

Gambar 3.33 Jarak kabel ke motor
3.3 Aplikasi
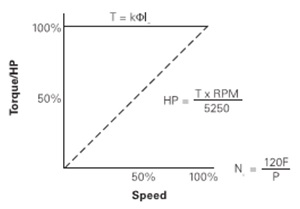
Ketika menerapkan AC drive dan motor ke sebuah aplikasi, diperlukan untuk mengetahui karateristik horsepower, torsi dan kecepatan pada beban. Gambar dibawah ini menunjukan karateristik umum untuk berbagai beban.
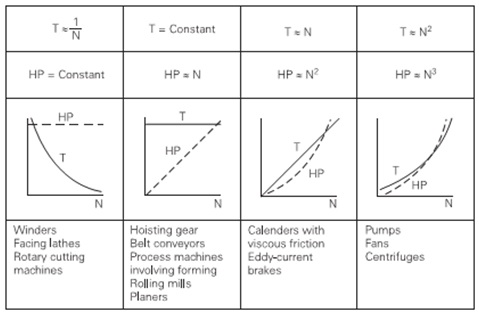
Gambar 3.34 Karateristik beban
Beban secara umum dibagi menjadi 3 kategori :
- Konstan torsi, beban dasarnya sama diseluruh rentang kecepatan. Contohnya, hoisting gear dan belt conveyor.
- Variabel torsi, beban meningkat karena kecepatan meningkat. Contohnya pompa dan fan.
- Konstan horsepower, beban menurun ketika kecepatan meningkat. Contohnya, winder dan rotary cutting.
Aplikasi Konstan Torsi
Beban konstan torsi mengartikan bahwa torsi yang diperlukan untuk menjaga beban tetap sama diseluruh rentang kecepatan. Harus diingat bahwa konstan torsi mengacu pada kemampuan motor untuk mempertahankan flux constant. Torsi yang dihasilkan akan bervariasi dengan beban yang diperlukan. Torsi puncak yang melebihi 100% dapat terjadi pada kecepatan berapa pun termasuk kecepatan nol. Salah satu contoh dari beban konstan torsi adalah conveyor yang ditunjukan pada gambar dibawah ini. Conveyor dapat ditemukan disemua jenis aplikasi dan lingkungan industri.

Gambar 3.35 Conveyor salah satu contoh aplikasi konstan torsi
Conveyor terdiri dari belt untuk menopang beban, berbagai pulley untuk menopang belt, menjaga ketegangan dan mengubah arah belt, dan roller untuk menopang belt dan beban.

Gambar 3.36 Komponen conveyor
Kecepatan dan horsepower dari aplikasi harus diketahui ketika memilih motor dan drive. Jika kecepatan conveyor dalam FPM, diameter pulley dalam inch dan gear ratio (G), kecepatan motor dapat ditentukan. Rumus berikut dapat digunakan untuk menghitung kecepatan motor yang diperlukan.
![]()
Sebagai contoh jika kecepatan yang dibutuhkan conveyor adalah 750 MPM, diameter pulley 18” dan gear ratio antar motor dan pulley 4:1, kecepatan maksimum motor adalah 638.3 RPM. Akan sangat sulit untuk menemukan motor yang akan beroperasi pada kecepatan tersebut. Motor 8-pole (900 RPM) dan AC drive dapat digunakan untuk aplikasi ini. Ini akan memungkinkan conveyor untuk beroperasi pada kecepatan nol dan maksimum kecepatan 750 FPM.

Keuntungan lain menggunakan AC drive pada conveyor adalah kemampuannya untuk beroperasi dalam bagian conveyor yang berbeda pada kecepatan berbeda. Sebagai contoh, mesin botol mungkin memiliki botol yang berfekatan untuk di isi dan kemudian disebarkan untuk diberi label. Dibutuhkan 2 motor dan 2 drive. Satu motor akan menjalankan bagian pengisian pada kecepatan yang diberikan dan motor kedua akan menjalankan bagian pelabelan sedikit lebih cepat menyebarkan botol keluar.
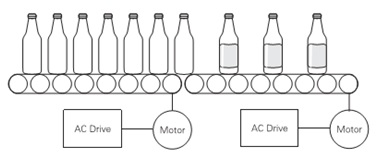
Gambar 3.37 Conveyor yang memiliki 2 bagian yang berbeda
Menghitung daya motor rumit dengan banyak variable, yang tidak akan dibahas pada materi ini. Diperlukan orang dengan pengetahuan dan pengalaman dengan operasi conveyor untuk menghitung horsepower yang dibutuhkan secara akurat. Horsepower yang dibutuhkan untuk menggerakan conveyor adalah tension efektif (Te) dikali kecepatan (V) pada belt dalam FPM dibagi 33.000.
![]()
Tension efektif (Te) ditentukan oleh beberapa kekuatan :
- Berat gravitasi beban.
- Panjang dan lebar belt.
- Gesekan material pada conveyor
- Gesekan semua komponen dan aksesoris
- Inersia pulley
- Berat belt
- Inersia motor
- Inersia roller
- Kekuatan akselerasi ketika material baru ditambahkan ke conveyor.
Jika tension efektif pada conveyor dikalkulasi menjadi 2000 pound dan kecepatan maksimumnya adalah 700 FPM, maka horsepower yang dibutuhkan adalah 45.5.
![]()
Torsi awal pada conveyor bisa 1.5 sampai 2 kali torsi beban penuh. Motor yang dapat menangani beban penuh conveyor mungkin tidak dapat start dan akselerasi conveyor sampai dengan kecepatannya. Umumnya AC drive dapat memberikan 1.5 kali torsi beban penuh untuk memulai putaran. Engineer mungkin perlu untuk memilih motor dan drive yang lebih besar agar dapat start dan mempercepat conveyor.
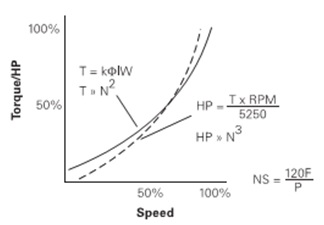
Kecepatan pada conveyor dinaikan dengan menaikan frekuensi (F) ke motor. Torsi (T) dipengaruhi oleh flux (Φ) dan arus kerja (Iw). Drive akan menjaga flux konstan dengan mempertahankan rasio tegangan dan frekuensi konstan. Untuk melakukan ini, drive manikin tegangan dan frekuensi secara proporsional. Selama percepatan arus akan meningkat menyebabkan peningkatan torsi. Ketika mencapai kecepatan barunya, arus dan torsi akan sama dengan kecepatan lamanya. Conveyor tidak dapat dioperasikan diatas frekuensi pengenal motor tanpa kehilangan torsi. Karena torsi proporsional terhadap (volt/hz)² jika ada peningkatan kecepatan akan meyebabkan torsi berkurang.
Hasilnya, motor tidak dapat memberikan torsi pengenalnya. Horsepower dipengaruhi oleh torsi dan kecepatan.
Gambar 3.38 Grafik torsi dan kecepatan konstan torsi
Aplikasi Variabel Torsi
Beban variabel torsi mengartikan bahwa torsi dan horsepower meningkat dengan peningkatan kecepatan. Beban lebih tidak dimungkinkan pada kecepatan rendah. Torsi puncak umumnya dibatasi oleh torsi pengenal. Contoh torsi variable adalah pompa dan fan.
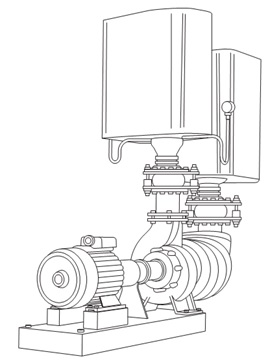
Gambar 3.39 Contoh aplikasi torsi variable
Ada beberapa jenis pompa. Jenis yang paling umum adalah pompa setrifugal seperti gambar dibawah ini. Ada beberapa variasi dari pompa sentrifugal, contohnya turbine dan propeller. Semakin cepat pompa setrifugal berputar, cairan akan lebih banyak dipompa dan semakin banyak torsi yang dibutuhkan. Sebagai catatan, tidak semua pompa adalah variabel torsi. Reciprocating, pompa displacement positif merupakan konstan torsi.

Gambar 3-40 Pompa sentrifugal
Menghitung horsepower untuk aplikasi pompa melibatkan proses yang membutuhkan sesorang yang mempunyai pengetahuan dari aplikasi pompa. Informasi dibawah ini hanya untuk ilustrasi. Ada 3 parameter yang terlibat untuk menghitung horsepower dalam apikasi pompa, cairan, mekanikal dan elektrikal.
Hydraulic head adalah perbedaan dalam tekanan hidrolik antara 2 titik, yang sebenarnya termasuk ketinggian, tekanan dan kecepatan. Peningkatan kecepatan pompa akan menyebabkan peningkatan tekanan dan kecepatan yang akan meningkatkan hydraulic head.
Horsepower cairan adalah daya hidrolik yang ditransfer ke cairan yang dipompa. Formula berikut ini dapat digunakan untuk menghitung energi cair.
Liquid Energy (ft-lb) = Total Head x Gallon x Weight
Berat jenis air 8.34 pounds per gallon. Jika 50 gallon air per menit yang diperlukan untuk dipindahkan melalui 100 feet head, energy yang dibutuhkan akan menjadi 41700 ft-lb/minute.
100 feet x 50 gallon x 8.34 = 41700 ft-lb/min
Jika kecepatan pompa dinaikan menjadi 100 gallon air yang dipompa melalui 100 feet head, energy akan menjadi 83400 ft-lb/minute.
1 horsepower sama dengan 33000 ft-lb/minute
Oleh karena itu, 41700 ft-lb/minute adalah 1.26 HP dan 83400 ft-lb/minute adalah 2.53 HP
41700/33000 = 1.26 HP 83400/33000 = 2.53 HP
Horsepower mekanikal adalah horsepower masukan ke pompa dan sama dengan horsepower cairan dibagi dengan efisiensi pompa. Jika horsepower cairan 2.53 dan efisiensi pompa adalah 75% maka horsepower mekanikal nya adalah 3.4 HP.
1.26/0.75 = 1.7 HP 2.53/0.75 = 3.4 HP
Horsepower elektrikal adalah horsepower yang dibutuhkan untuk menjalankan motor yang mengendalikan pompa dan sama dengan horsepower mekanikal dibagi dengan efisiensi motor. Jika efisiensi motor 90% maka horsepower elektrikal nya adalah 3.78 HP. Dapat dilihat bahwa dengan meningkatkan kecepatan pompa akan menaikan horsepower elektrikal.
1.7/0.9 = 1.9 HP 3.4/0.9 = 3.8 HP
Kecepatan pompa dapat dinaikan dengan menaikan frekuensi (F) ke motor. Torsi (T) dipengaruhi oleh flux (Φ) dan arus kerja (Iw). Drive akan menjaga flux dengan mengatur rasio tegangan dan frekuensi tergantung pada kecepatan. Ketika percepatan, arus kerja akan meningkat menyebabkan peningkatan torsi. Pada aplikasi ini, torsi meningkat sebanding dengan kecepatan pangkat dua. Ini karena peningkatan dalam hydraulic head karena pompa bekerja lebih keras untuk memompa cairan lebih banyak. Horsepower meningkat sebanding dengan kecepatan pangkat tiga karena pengingkatan torsi dan kecepatan. Pompa tidak dapat dioperasikan diatas frekuensi pengenal motor karena drive tidak dapat menyediakan flux konstan. Hasilnya, motor tidak akan dapat memberikan torsi pengenalnya.
Gambar 3.41 Grafik torsi dan kecepatan torsi variable
Prinsip yang sama diterapkan pada fan. Horsepower fan ditentukan dengan membagi aliran udara yang dihasilkan (dalam cubic feet per minute) dan tekanan oleh konstanta 6356 dan efisiensi fan. Menaikan kecepatan fan akan meningkatkan aliran udara dan tekanan, motor akan berkerja lebih keras. (arus meningkat). Torsi dan horsepower meningkat.
![]()
Aplikasi Konstan Horsepower
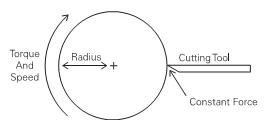
Aplikasi konstan horsepower membutuhkan kekuatan yang konstan ketika jari-jari berubah. Sebagai contoh mesin bubut, obyek dimulai dengan diameter tertentu. Karena obyek dipotong dan dibentuk, diameter jadi berkurang. Kekuatan memotong harus tetap konstan. Contoh lain dari aplikasi konstan horsepower adalah winder dimana jari-jari meningkat ketika material ditambahkan untuk digulung.
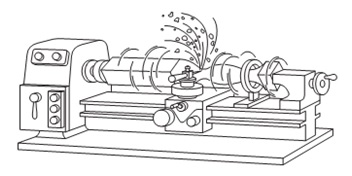
Gambar 3.42 Contoh aplikasi horsepower konstan
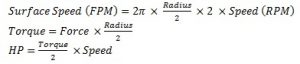
Aplikasi seperti mesin bubut yang digerakan dalam gerakan memutar terus-menerus kadang disebut juga sebagai drive spindle. Horsepower tetap konstan dalam aplikasi spindle. Kecepatan permukaan dalam FPM sama dengan 2π dikali jari-jari (dalam feet) dari material dikali kecepatan dalam RPM. Kecepatan permukaan akan tetap konstan saat material dibentuk dan jari-jari berkurang. Torsi sama dengan force dikali jari-jari. Horsepower sama dengan torsi dikali kecepatan.
Gambar 3.43 Konstan Horsepower pada aplikasi spindle
![]()
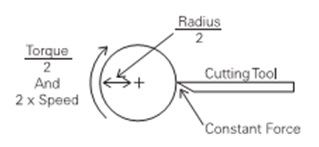
Drive meningkatkan kecepatan (RPM) material saat jari-jari berkurang. Jika alat pemotoong telah memotong separuh jari-jarinya, RPM harus berlipat ganda untuk mempertahankan kecepatan (FPM) permukaan konstan. Mengurangi setengah jari-jari akan menyebabkan pengurangan torsi. Menggandakan kecepatan (RPM) dan mengurangi torsi hingga setengahnya menyebabkan horsepower tetap konstan.
Gambar 3.44 Konstan Horsepower
Jari-jari lebih kecil membutuhkan torsi sedikit untuk berputar. Karena torsi menurun dengan jari-jari lebih kecil, motor yang beroperasi pada aplikasi horsepower konstan dapat berjalan diatas kecepatan pengenal. Sebagai contoh, motor 60 Hz dapat bekerja pada 90 Hz ketika jari-jari minimum. RPM harus ditingkatkan untuk menjaga kecepatan permukaan konstan. Kenaikan pada kecepatan (RPM) dan penurunan dalam torsi berarti horsepower akan tetap konstan.
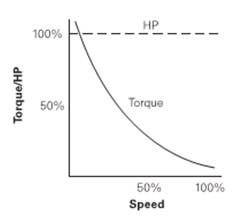
Gambar 3.45 Grafik torsi dan kecepatan konstan horsepower
Aplikasi Multimotor
Banyak aplikasi membutuhkan lebih dari 1 motor. Dalam beberapa kasus, satu drive dapat memasok dua motor atau lebih. Ketika ini terjadi, julah semua arus pengenal motor tidak boleh melebihi arus pengenal AC drive. Aplikasi lain membutuhkan beberapa motor dan drive. Mesin spinning untuk produksi fiber syntetic adalah salah satu contoh aplikasi multimotor dan multidrive. Beberapa motor menjalankan extruder, pompa spinning, preparation rolss, godets, traversing dan winder. Satu drive dapat memasok semua motor pompa spinning atau semua motor godet atau mengoperasikan motor secara individu untuk setiap pompa atau godet.
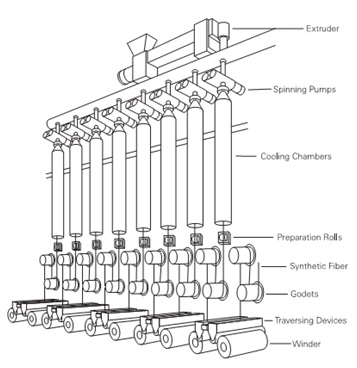
Gambar 3.46 Aplikasi mutimotor mesin spinning
Referensi :
- Siemens Basic AC Drive
- Electrical Drive : Principal-Planning-Application-Solution, Jens Weidauer & Richard Messer
Leave a Comment