2.1 Bagian I/O
Input/Output dari sebuah PLC adalah bagian dimana semua perangkat di lapangan dihubungkan dan menyediakan antarmuka antara perangkat dan CPU. Pada jenis fixed, I/O digabung bersamaan dengan CPU dan jenis modular menggunakan eksternal modul I/O yang dipasang ke CPU.
Gambar 2-1 mengilustrasikan I/O rack-based yang terdiri dari beberapa modul I/O. Antarmuka modul input menerima sinyal dari mesin atau perangkat proses dan mengubahnya ke sinyal yang nantinya digunakan oleh controller. Antarmuka modul output mengubah sinyal controller yang nantinya digunakan untuk mengendalikan mesin atau proses. Pada umumnya PLC mempunyai ruang untuk beberapa modul I/O, memungkinkan untuk disesuaikan pada aplikasi tertentu dengan memilih modul yang sesuai.
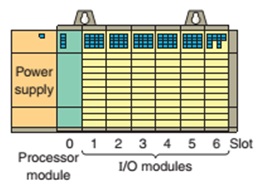
Gambar 2-1 I/O rack-based
Salah satu keuntungan sistem PLC adalah kemampuan untuk menempatkan modul I/O dekat terhadap perangkat di lapangan, dengan tujuan meminimalisir kebutuhan jumlah kabel. Processor menerima sinyal dari remote modul input dan mengirim kembali sinyal ke modul output melalui modul komunikasi.
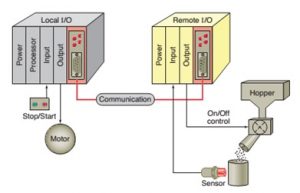
Gambar 2-2 Remote I/O
Rack yang ditempatkan berjauhan dengan modul processor disebut sebagai remote rack. Untuk berkomunikasi dengan processor, remote rack menggunakan jaringan komunikasi. Setiap remote rack membutuhkan nomor station yang berbeda-beda. Remote rack berhubungan dengan local rack melalui modul komunikasi.
Memori PLC menyimpan informasi status semua input dan output. Untuk tetap menjaga semua informasi, PLC menggunakan sistem yang disebut pengalamatan (addressing). Sebuah alamat merupakan label atau nomor yang mengindikasikan dimana informasi ini dilokasikan pada memori PLC. Jika PLC ingin menemukan informasi tentang perangkat, PLC tahu dimana letak lokasi alamat yang sesuai. Contoh dari skema pengalamatan yang menyertakan rack/slot-based digunakan pada Allen-Bradley PLC-5 dan SLC 500, tag-based digunakan pada Allen-Bradley ControlLogix dan PC-based control digunakan pada soft PLC.
Pada dasarnya, elemen pengalamatan rack/slot based meliputi :
- Slot. Nomor slot adalah lokasi fisik dari modul I/O. Bisa kombinasi dari nomor rack dan nomor slot ketika menggunakan expansion rack.
- Word and Bit. Word dan bit digunakan untuk mengindentifikasi koneksi aktual terminal pada modul I/O. Sebuah modul diskrit biasanya hanya menggunakan satu word dan setiap koneksi berhubungan dengan bit yang berbeda-beda yang membuat sebuah word.
Dengan pengalamatan sistem rack/slot, lokasi modul didalam rack dan nomor terminal dari modul yang mana perangkat input atau output terkoneksi akan menentukan alamat perangkat tersebut.

Gambar 2-3 Pengalamatan dengan format rack/slot pada AB PLC-5
Gambar 2-4 mengilustrasikan format pengalamatan Allan Bradley SLC 500. Alamat digunakan processor untuk mengindentifikasi lokasi perangkat supaya dapat dimonitor dan dikendalikan.

Gambar 2-4 Pengalamatan dengan format rack/slot pada AB SLC 500
Setiap perangkat input dan output yang dihubungkan ke module diskrit I/O dialamatkan ke bit yang spesifik didalam memori PLC. Bit adalah binary digit yang nilainya berupa 1 atau 0. Module analog I/O menggunakan format pengalamatan word. Gambar 2-5 mengilustrasikan pengalamatan bit level dan word level yang diaplikasikan pada SLC 500.

Gambar 2-5 Pengalamatan bit level dan word level pada SLC 500
Pada gambar 2-6 mengilustrasikan pengalamatan Allan Bradley ControlLogix dengan format tag-based. Dengan Logix5000, anda dapat menggunakan sebuah tag (nama alphanumeric) ke data alamat (variable). Disamping format angka tetap, nama tag itu sendiri mengindentifikasikan data. Nama tag mereferensikan perangkat ketika program PLC dibuat.

Gambar 2-6 Pengalamatan dengan format tag-based pada AB ControlLogix
Setiap PLC berbeda format pengalamatannya, pada PLC Siemens, status sinyal dialamatkan langsung melalui alamat dalam operand area. Sebagai contoh %I5.2, memuat operand ID, alamat byte dan alamat bit yang dipisahkan oleh titik. Operand ID memuat operand area dan spesifikasi luas operand. Sebuah alamat absolute di tampilkan dengan tanda persen (%).
PC-based control bekerja pada komputer personal atai komputer industrial, juga dikenal dengan nama soft PLC. Soft PLC mensimulasikan fungsi PLC dalam PC, memungkinkan sistem arsitektur terbuka untuk menggantikan proprietary PLC. Implementasi ini menggunakan kartu Input/Output bersamaan dengan PC sebagai antarmuka untuk perangkat dilapangan.

Gambar 2-7 Kartu antarmuka
Modul I/O kombinasi mempunyai koneksi input dan output pada fisik modul tersebut yang diilustrasikan pada gambar 2-8. Sebuah modul terbuat dari printed circuit board (PCB) dan terminal assembly. PCB memuat sirkuit elektronik digunakan sebagai antarmuka ke sirkuit processor. Terminal assembly digunakan untuk membuat koneksi keperangkat di lapangan.

Gambar 2-8 Modul I/O kombinasi
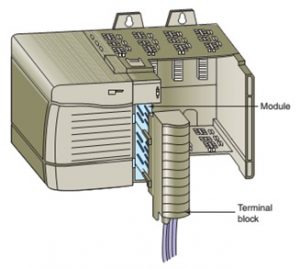
Banyak PLC yang menggunakan plug-in terminal. Blok terminal dipasang ke modul I/O seperti yang diilustrasikan dengan gambar 2-9. Jika ada masalah dengan modul, blok terminal bisa dilepas, modul yang baru dipasang dan blok terminal dipasang pada modul yang baru. Pastikan blok terminal sesuai dengan jenis modul I/O, pemasangan blok terminal pada module I/O yang berbeda bisa menyebabkan kerusakan pada modul I/O.
Modul input dan output bisa dipasang dimanapun dalam sebuah rack tapi secara normal digroup untuk memudahkan pengkabelan. Modul I/O terdiri dari 8, 16, 32 atau 64 point. Modul I/O high-density bisa memiliki sampai dengan 64 input atau output. Keuntungan dari modul high-density memungkinkan untuk memasang 64 point input atau output dalam satu slot untuk penghematan ruang. Kekurangan hanya pada modul output high-density tidak dapat menangani arus yang besar per output.
Gambar 2-9 Blok terminal plug-in

Gambar 2-10 modul I/O 16, 32 dan 64 point
2.2 Modul Diskrit I/O
Jenis modul I/O yang banyak dipakai adalah diskrit. Jenis ini menghubungkan perangkat input yang mempunyai sifat ON/OFF seperti saklar pilih, tombol tekan dan limit switch. Begitu juga dengan perangkat output seperti indikator, relay, solenoid dan motor starter yang bekerja hanya ON/OFF saja.

Gambar 2-11 Perangkat input dan output
Setiap modul diskrit I/O diberikan sumber tegangan dari luar. Modul I/O tersedia dalam berbagai tegangan AC dan DC, seperti yang di tunjukan dengan tabel 2-1.
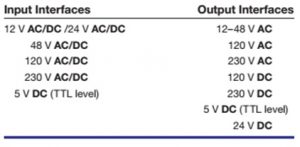
Tabel 2-1 Modul I/O dalam berbagai tegangan
Modul itu sendiri menerima tegangan dan arus untuk bekerja dari backplane sebuah rack. Daya backplane disediakan oleh modul catu daya dan digunakan untuk daya elektronik pada papan sirkuit modul I/O. Semakin banyak modul I/O pada sebuah rack, semakin besar kebutuhan arusnya.

Gambar 2-12 Modul menerima tegangan dan arus dari backplane
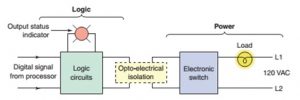
Gambar 2-13 menggambarkan blok diagram dari satu input alternating current (AC). Sirkuit input tersusun dari dua bagian : bagian daya dan bagian logika. Sebuah optical isolator digunakan untuk menyediakan isolasi elektrik antara perangkat dan internal sirkuit backplane. Input LED akan menyala atau mati, mengindikasikan status perangkat input. Sirkuit logika memproses sinyal digital ke processor. Internal sirkuit biasanya beroperasi pada tegangan 5VDC atau kurang.

Gambar 2-13 Blok diagram Input AC diskrit
Sirkuit diagram dari satu diskrit input AC ditunjukan pada gambar 2-14. Cara kerja sirkuit dapat disimpulkan sebagai berikut :
- Input noise filter terdiri dari kapasitor dan resistor R1 dan R2 menghilangkan false signal yang terjadi karena contact bounce atau interferensi elektrik.
- Ketika tombol di tekan, 120VAC diterapkan ke input jembatan penyearah (bridge rectifier).
- Ini menghasilkan tegangan output DC level rendah diterapkan pad LED optical isolator.
- Tingkat tegangan dioda zener (Zd) menetapkan tingkat ambang batas minimum tegangan yang dapat dideteksi.
- Ketika cahaya dari LED mencapai phototransistor, menyebabkan peralihan ke konduksi dan status dari tombol tekan dikomunikasikan secara logika ke processor.
- Optical isolator tidak hanya memisahkan tegangan AC dari sirkuit logika tapi juga menjaga kerusakan processor karena transien saluran tegangan. Isolator juga membantu menurunkan efek gangguan listrik.
- Status indikator LED akan menyala ketika tombol ditekan untuk keperluan diagnosa.
- Modul input memiliki input yang terisolasi satu sama lainnya.

Gambar 2-14 Sirkuit diagram untuk satu input diskrit AC
Module diskrit input melakukan empat tugas pada kontrol sistem PLC, yaitu :
- Mendeteksi ketika sinyal diterima dari perangkat.
- Mengubah sinyal input ke tingkat tegangan yang sesuai untuk PLC tertentu.
- Mengisolasi PLC dari fluktuasi sinyal input.
- Mengirim sinyal ke processor yang menunjukan dari sensor mana sinyal berasal.
Gambar 2-15 menunjukan blok diagram dari satu output sebuah module diskrit output. Seperti modul input, modul output terdiri dari dua bagian : bagian daya dan bagian logika. Antarmuka output bisa berupa saklar elektronik yang menghidupkan atau mematikan perangkat. Sirkuit logika menentukan status output. LED mengindikasikan status dari sinyal output.
Gambar 2-15 Blok diagram diskrit output AC
Sirkuit diagram dari satu diskrit output AC ditunjukan pada gambar 2-16. Cara kerja sirkuit dapat disimpulkan sebagai berikut :
- Sirkuit logika processor menetapkan status output berdasarkan program.
- Ketika processor memanggil output untuk bekerja, tegangan di terapkan pada LED opto-isolator.
- Kemudian LED memancarkan cahaya, yang menyebabkan peralihan phototransistor ke konduksi.
- Ini akan memicu triac AC semiconductor beralih ke konduksi yang memungkinkan arus mengalir ke beban output.
- Selama triac berkonduksi, output ke beban adalah alternating current.
- Triac, sebenarnya memiliki tingkat resistansi LOW dan HIGH. Dalam kondisi OFF (resistansi HIGH) arus bocor yang kecil beberapa miliampere masih mengalir melalui triac.
- Sama dengan sirkuit input, antarmuka modul output biasanya menyediakan LED yang mengindikasikan status masing-masing output.
- Sekering normalnya dibutuhkan untuk modul output dan disediakan per sirkuit yang memungkinkan setiap sikuit terlindungi. Beberapa modul juga menyediakan indikator untuk status sekering.
- Triac tidak dapat digunakan untuk beban DC.
- Status LED indikator output menyala ketika PLC memerintah beban output bekerja untuk keperluan diagnosa.
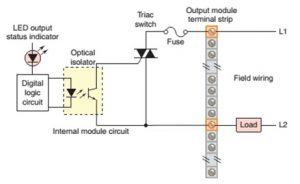
Gambar 2-16 Sirkuit diagram untuk satu diskrit output AC
Untuk mengendalikan beban yang besar, biasanya menggunakan relay yang dihubungkan ke modul output. Kontak relay dapat digunakan untuk mengendalikan beban yang besar. Ketika menggunakan relay kendali ini disebut juga interposing relay.

Gambar 2-17 Koneksi ineterposing relay
Modul diskrit output tersedia dalam jenis AC dan DC dan berbagai rentang tegangan dan arus. Modul output dapat dibeli dengan jenis output transistor, triac atau relay seperti yang diilustrasikan pada gambar 2-18.

Gamabr 2-18 Modul output relay, transistor dan triac
Output triac hanya dapat digunakan untuk perangkat tegangan AC, output transistor hanya dapat digunakan untuk perangkat tegangan DC. Relay output dapat digunakan untuk perangkat tegangan AC atau DC tapi memiliki respon lebih lambat dibanding dengan output solid state.
Module I/O DC tertentu dirancang untuk berinteraksi dengan perangkat current source atau current sink. Beberapa modul memungkinkan pemakai untuk memilih apakah modul akan bekerja sebagai current sinking atau current sourcing, tergantung kebutuhan perangkatnya.
Secara umum, sinking (NPN) dan sourcing (PNP) adalah terminologi yang digunakan untuk menjelaskan sinyal aliran arus yang berhubungan dengan perangkat input dan output dalam sistem kontrol dan catu dayanya. Gambar 2-19 mengilustrasikan aliran arus yang berhubungan dengan input sinking dan sourcing ke modul input DC.
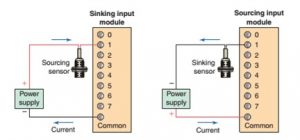
Gambar 2-19 Input sinking dan sourcing
Pada gambar 2-20 mengilustrasikan aliran arus yang berhubungan antara output sinking dan sourcing. Perangkat yang dihubungkan ke sisi positif (+) pada catu daya diklasifikasikan sebagai perangkat sourcing. Sebaliknya, perangkat yang dihubungkan ke sisi negatif (-) atau dari DC common pada catu daya adalah perangkat sinking.

Gambar 2-20 Output sinking dan sourcing
2.3 Modul Analog I/O
Saat ini, baik modul diskrit dan analog sudah tersedia yang akan memungkinkan controller untuk diaplikasikan pada berbagai jenis proses kontrol. Perangkat analog menggambarkan kuantitas fisik yang dapat memiliki angka-angka. Analog input dan output yang umum bervariasi dari 0 – 20mA, 4 – 20mA atau 0 – ±10 volts. Gambar 2-21 mengilustrasikan bagaimana modul analog input dan output pada PLC digunakan untuk mengukur dan menampilkan ketinggian cairan dari sebuah bejana.
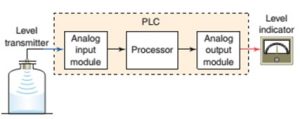
Gambar 2-21 Analog input dan output pada PLC
Modul analog input memiliki sirkuit yang diperlukan untuk menerima sinyal tegangan analog atau arus dari perangkat level transmitter. Input ini diubah dari sinyal analog ke nilai digital untuk digunakan oleh processor. Sirkuit modul analog output menerima nilai digital dari processor dan diubah menjadi sinyal analog yang akan menggerakan level meter.
Modul analog input mempunyai beberapa saluran input yang memungkinkan 4, 8 atau 16 perangkat dapat dihubungkan ke PLC. Jenis yang umum dari modul analog adalah voltage sensing dan current sensing. Kuantitas fisik yang umum diukur oleh modul analog PLC yaitu suhu, kecepatan, ketinggian, aliran, berat, tekanan dan posisi.
Pada gambar 2-22 mengilustrasikan sebuah contoh voltage sensing modul analog input digunakan untuk mengukur suhu. Tegangan DC bervariasi dalam kisaran milivolt, sebanding dengan suhu yang dihasilkan oleh thermocouple. Tegangan ini dikuatkan dan didigitalkan oleh module analog input dan kemudian dikirim ke processor sesuai perintah dari programnya. Karena tingkat tegangan rendah, kabel twisted shield pair digunakan dalam pengkabelan untuk menurunkan noise elektrikal yang tidak dinginkan. Untuk mendapatkan hasil yang akurat dari masing-masing saluran, suhu antara kabel thermocouple dan saluran input harus dikompensasi. Sebuah thermistor cold junction compensating (CJC) dipasang pada blok terminal untuk tujuan tersebut.
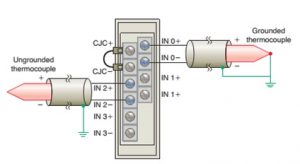
Gambar 2-22 Modul input analog thermocouple
Perubahan dari sinyal analog ke nilai digital dilakukan oleh sebuah konverter analog-to-digital (A/D), elemen utama dari modul analog input. Modul analog input tegangan tersedia dalam dua jenis : unipolar dan bipolar. Unipolar dapat menerima sinyal input yang bervariasi pada arah positif saja, contohnya perangkat yang mengeluarkan sinyal 0 V sampai +10 V. Sinyal bipolar antara nilai negatif maksimum dan nilai positif maksimum, contohnya perangkat yang mengeluarkan sinyal -10V sampai +10V. Resolusi sebuah saluran analog input mengacu pada perubahan kecil pada nilai sinyal input yang dapat dideteksi dan berdasarkan pada jumlah bit yang digunakan dalam represntasi digital.
Ketika mengkoneksikan input voltage sensing, harus memenuhi persyaratan mengenai panjang kabel untuk meminimalkan degradasi sinyal dan efek gangguan elektromagnetik. Sinyal input arus, tidak terlalu sensitif terhadap gangguan seperti sinyal tegangan. Module input current sensing umumnya menerima sinyal analog 4 mA sampai 20 mA tapi dapat mengakomodasi sinyal -20 mA sampai +20 mA. Daya loop dapat dipasok oleh sensor atau disediakan juga oleh module analog.

Gambar 2-23 Daya yang diberikan dari sensor dan modul analog
Modul analog output menerima data digital dari processor, kemudian diubah menjadi tegangan atau arus untuk mengendalikan perangkat. Perubahan sinyal digital ke nilai analog dilakukan oleh sebuah konverter digital-to-analog (D/A), elemen utama dari module analog output. Perangkat umum yang dikontrol oleh modul analog output PLC yaitu control valve, chart recorder, electronic drive dan perangkat lainnya yang dapat menerima sinyal analog.
Pada gambar 2-24 mengilustrasikan penggunaan module analog I/O. Pada aplikasi ini PLC mengontrol jumlah cairan yang ditampung pada bejana dengan mengatur pembukaan katup. Analog output dari PLC digunakan untuk mengontrol aliran dengan mengatur pembukaan katup. Ketika ketinggian cairan mendekati nilai yang diinginkan, processor memodifikasi sinyal output untuk menjaga ketinggian yang diinginkan.

Gambar 2-24 Sistem kendali analog I/O
2.4 Modul I/O Khusus
Modul High Speed Counter
Modul high-speed counter digunakan untuk aplikasi yang membutuhkan perhitungan cepat yang melampaui kemampuan dari program PLC. Modul high-speed counter digunakan untuk menghitung pulsa dari sensor, encoder dan saklar yang bekerja sangat cepat. Modul ini mempunyai sirkuit elektronik untuk menghitung yang berdiri sendiri. Rentang kecepatan penghitungan tersedia sampai dengan 100 kHz, yang artinya modul bisa menghitung 100.000 pulsa per detik.

Gambar 2-25 modul high speed counter
Modul PID
Proportional-integral-derivative (PID) digunakan dalam proses aplikasi yang memerlukan kendali loop tertutup menggunakan algoritma PID. Modul PID menyediakan kendali proportional, integral dan derivative dari variabel input.
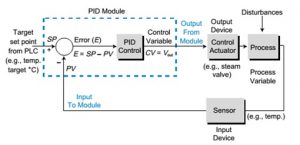
Gambar 2-26 dan 2-27 mengilustrasikan kendali PID dalam blok diagram dan proses aplikasi. Fungsi dasar dari kendali loop tertutup untuk menjaga karateristik proses agar sesuai dengan nilai yang diinginkan (setpoint).
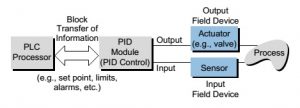
Gambar 2-26 Blok diagram kendali PID

Gambar 2-27 Ilustrasi proses kendali PID
Karateristik proses terkadang menyimpang dari nilai yang diinginkan akibat dari perubahan muatan material, ganguan (disturbance), dan interaksi dengan proses lain. Selama pengendalian, aktual karateristik proses (liquid level, flow rate, temperature, dan lain-lain) diukur sebagai process variable (PV) dan dibandingkan dengan target nilai yang diinginkan (SP). Jika PV menyimpang dari SP, sebuah error (E) terjadi (E=SP-PV). Ketika modul mendeteksi error, kendali loop memodifikasi output control variable (CV) supaya error mendekati nol.
Gambar 2-28 Proses kendali loop tertutup
Modul Positioning
Modul positioning merupakan modul cerdas yang memberikan position-related feedback. Kemampuan pengendalian pergerakan pada modul positioning memungkinkan PLC untuk melakukan fungsi menggunakan mekanisme servo seperti point-to-point control dan axis positioning.
Modul positioning menggunakan instruksi PLC yang mengirim blok data pada satu waktu. Data-data ini yaitu initialization parameter, jarak dan batas, dan kecepatan.

Gambar 2-29 Konfigurasi positioning
Modul BASIC atau ASCII
Module BASIC atau ASCII menjalankan program BASIC atau C yang dibuat oleh pengguna. Program terpisah dari processor PLC dan menyediakan antarmuka yang mudah dan cepat antara perangkat khusus dan processor PLC. Aplikasi umum yang menggunakan modul ini yaitu barcode reader, robots, printer dan lain-lain.
Modul ASCII mengirim dan menerima data antara perangkat dan controller. Informasi tukar-menukar melalui RS-232C, RS-485 atau 20 mA current loop. Modul ASCII menerima daya dari backplane sebuah rack.

Gambar 2-30 Modul ASCII
Module BASIC, juga disebut juga sebagai modul data-processing adalah modul cerdas yang mampu untuk melakukan tugas komputisasi tanpa membebani processor PLC. Pada kenyataannya, module data-processing adalah paket komputer personal dalam sebuah modul I/O. intruksi bahasa BASIC digunakan pada modul ini, produsen PLC memasukan instruksi tambahan ke modul BASIC yang meungkinkan untuk mengakses memori PLC.
Beberapa modul data-processing dapat menjalankan bahasa selain BASIC, seperti PASCAL, C atau bahasa pemrograman tingkat tinggi lainnya. Port pemrograman pada modul BASIC umumnya sesuai dengan standar RS-232C, RS-422 dan RS-485. Antarmuka modul juga setidaknya mempunyai satu serial port untuk berkomunikasi dengan printer, modem, dan perangkat serial lainnya.

Gambar 2-31 Module BASIC
Modul Stepper Motor
Modul stepper motor digunakan dalam aplikasi yang membutuhkan stepper motor. Stepper motor adalah motor permanent magnet yang merubah pulsa yang masuk, melalui stepper drive, menjadi pergerakan mekanikal.
Pergerakan dari stepper dapat dipercepat, diperlambat atau dipertahankan dengan mengendalikan nilai pulsa. Pergerakan stepper motor mengikuti jumlah pulsa yang masuk. Kemampuan ini untuk merespon supaya sistem bisa bekerja dalam mode loop terbuka. Tetapi, pada aplikasi yang memerlukan respon tinggi, umumnya membutuhkan loop tertutup.
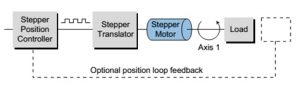
Gambar 2-32 Blok diagram dari stepper motor
Modul stepper membuat pulse train yang sesuai dengan stepper drive yang mengindikasikan perintah jarak, kecepatan dan arah motor. Gerakan bisa berupa putaran atau linear, seperti pergerakan maju dan mundur dari linear slide yang menggunakan leadscrew. Gambar 2-33 menunjukan linear slide yang umum menggunakan stepper motor yang membuat satu putaran per 200 step, sehingga menghasilkan sudut langkah 1.8° (360/200 atau 1/200 dari satu putaran). Sistem stepper pada gambar menghasilkan pergerakan linear 0.00125 inch per step karena leadscrew memiliki 4 ulir per inch.
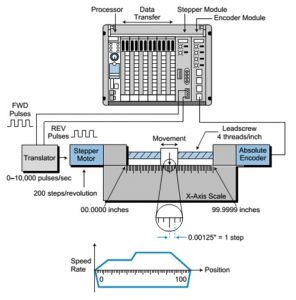
Gambar 2-33 Linear slide menggunakan motor stepper
Modul Komunikasi
Modul komunikasi memungkinkan beberapa PLC dan perangkat cerdas lainnya untuk berkomunikasi dan menyampaikan data PLC melalui jaringan komunikasi berkecepatan tinggi. Saat ini, produsen pihak ketiga membuat produk yang sesuai dengan jaringan PLC yang berbeda-beda. Adapun jaringan yang populer yaitu :
- Jaringan tingkat perangkat (seperti CANbus, Seriplex, dll) yang biasanya digunakan untuk perangkat diskrit.
- Jaringan perangkat proses (seperti Fieldbus dan Profibus) yang biasanya digunakan untuk perangkat analog.
- Jaringan Ethernet/IEEE 802.3 digunakan untuk CPU PLC dan komputer.
- Jaringan proprietary, biasanya digunakan oleh produsen PLC yang besar.
Modul komunikasi mengimplementasikan semua koneksi komunikasi dan protocol yang diperlukan untuk memastikan supaya pesan dapat disampaikan secara akurat memalui jaringan. Pada umumnya, ketika processor atau perangkat jaringan lainnya mengirimkan pesan, modul komunikasi meneruskan pesan tersebut melalui jaringan pada kecepatan sesuai dengan baud rate. Modul komunikasi yang menerima kiriman, memberikan pesan tersebut ke processor dan jika diperlukan, mengirim perintah ke perangkat yang dimaksudkan.
Modul komunikasi dapat dikoneksikan pada jarak sampai dengan 10.000 feet, dengan 100 atau 1000 perangkat, tergantung jenis jaringan dan konfigurasinya. Media komunikasi bervariasi tergantung jenis jaringannya juga.

Gambar 2-34 Jaringan komunikasi PLC
2.5 Central Processing Unit (CPU)
CPU, controller dan processor adalah terminologi yang digunakan oleh produsen yang berbeda untuk melakukan fungsi yang sama. Processor bervariasi pada kecepatan proses dan memori. Modul processor dibagi menjadi dua bagian yaitu : CPU dan memori (gambar 2-35). Bagian CPU mengeksekusi program dan membuat keputusan yang dibutuhkan oleh PLC untuk beroperasi dan komunikasi dengan modul lainnya. Bagian memori secara elektonik menyimpan program PLC bersamaan dengan informasi digital lainnya.
Catu daya PLC menyediakan daya yang diperlukan (biasanya 5 VDC) ke processor dan modul I/O yang dipasang pada backplane sebuah rack (gambar 2-36). Catu daya merubah 115 VAC atau 230 VAC ke tegangan DC yang dapat dipergunakan oleh CPU, memori dan sirkuit elektronik I/O.
CPU memiliki microprocessor yang sama dengan personal komputer. Perbedaannya pada program yang digunakan oleh microprocessor dirancang untuk memfasilitasi kontrol industri. CPU menjalankan operating system, mengelola memori, monitor input, mengevaluasi logika dan mengaktifkan output yang sesuai.

Gambar 2-35 Bagian dari modul processor PLC

Gambar 2-36 Catu daya PLC
CPU pada sistem PLC dapat memuat lebih dari satu processor. Salah satu keuntungan menggunakan multi processor yaitu kecepatan kerja meningkat. Masing-masing processor mempunyai memori dan program tersendiri, yang bekerja secara bersamaan dan mandiri. Sistem PLC fault-tolerant mendukung processor ganda untuk proses kritis. Sistem tersebut memungkinkan pemakai untuk mengkonfigurasi dengan redundant processor, yang memungkinkan memindahkan kendali ke processor kedua bila terjadi kesalahan processor pertama.
Modul processor mempunyai beberapa indikator status yang berguna untuk mendiagnosa sistem. Juga, sebuah keyswitch yang berguna untuk memilih mode operasi. Modul processor juga memiliki sirkuit untuk komunikasi dengan perangkat pemrograman. Processor melakukan fungsi proses logic, timing, counting, latching, comparing, motion control dan complex math.
Saat ini, processor lebih cepat dan mempunyai instruksi-instruksi tambahan yang ditambahkan pada processor model baru.

Gambar 2-37 Modul processor
Komponen elektronik yang ada di processor dan modul-modul PLC lainnya sensitif terhadap tegangan elektrostatis yang dapat menurunkan kemampuan ata merusaknya. Dibawah ini prosedur yang harus diikuti ketika menangani dan bekerja dengan perangkat yang sensitif terhadap elektrostatis :
- Tempatkan (ground) diri anda dengan menyentuh permukaan yang konduktif sebelum menangani komponen yang peka terhadap statis.
- Pakai tali pergelangan yang memberikan jalan terhadap elektrostatis yang mungkin terjadi ketika bekerja.
- Jangan menyentuh konektor backplane atau pin konektor pada sistem PLC (selalu tangani circuit card dengan memegang tepi nya).
- Jangan menyentuh komponen sirkuit lain pada modul ketika anda mengkonfigurasi atau mengganti komponen internal.
- Ketika tidak digunakan, simpan modul dalam tempat pelindung statis.
- Jika tersedia, gunakan ruangan yang anti statis.
2.6 Rancangan Memori
Memori adalah elemen yang menyimpan informasi, program, dan data pada PLC. Data yang disimpan dalam memori oleh sebuah proses disebut menulis (writing). Data yang diambil dari memori oleh sebuah proses disebut membaca (reading).
Program yang kompleks menentukan besaran memori yang dibutuhkan. Elemen memori menyimpan bagian-bagian informasi yang disebut bits (binary digits). Kapasitas besaran memori ditentukan dalam penambahan 1000 atau dalam “K”, dimana 1 K adalah 1024 byte (1 byte adalah 8 bits).
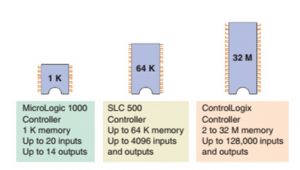
Program yang tersimpan dalam memori adalah 1 dan 0, dimana pada umumnya dihimpun dalam format 16 bit word. Ukuran memori pada umumnya diekspresikan dalam ribuan word yang dapat disimpan dalam sistem; dimana 2 K memori adalah memori 2000 words, dan 64 K adalah memori 64.000 word. Kapasitas memori bervariasi dari yang paling kecil 1 K sampai 32 MB (gambar 2-38).
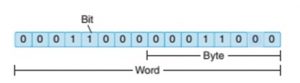
Lokasi memori menunjukan sebuah alamat dalam memori CPU dimana sebuah binary word dapat disimpan. Sebuah word biasanya terdiri dari 16 bits. Setiap bagian binari dari data adalah bit dan 8 bits membuatnya menjadi 1 byte (gambar 2-40).
Gambar 2-38 Ukuran memori PLC
Gambar 2-39 Memori bit, byte dan word
Memori PLC dapat dipecah menjadi beberapa bagian yang mempunyai fungsi yang sudah ditentukan. Bagian memori yang digunakan untuk menyimpan status input dan output disebut file status input atau tabel status input dan file status output atau tabel status output (gambar 2-40). Tabel input dan output terus direvisi oleh CPU. Setiap kali lokasi memori di periksa, tabel berubah jika status kontak atau coil berubah.

Gambar 2-40 Tabel input dan output
2.7 Jenis Memori
Memori dapat dibagi menjadi dua kategori : volatile dan non-volatile. Memori volatile akan kehilangan informasi yang telah disimpan jika daya hilang. Volatile memori mudah diubah dan cukup sesuai untuk sebagian besar aplikasi bila didukung oleh baterai cadangan.
Memori non-volatile mempunyak kemampuan untuk mempertahankan informasi yang disimpan ketika daya hilang. PLC mempunyai mempunyai memori pragrammable yang memungkinkan pemakai untuk membuat dan memodifikasi program kontrol. Memori ini dibuat dengan non-volatile jadi jika daya hilang, PLC tetap menyimpan program tersebut.
Read Only Memory (ROM) menyimpan program dan data yang tidak dapat dirubah setelah chip memori dibuat. ROM biasanya digunakan untuk menyimpan program dan data yang mendefinisikan kemampuan PLC. ROM merupakan memori non-volatile. ROM digunakan oleh PLC untuk sistem operasi. Sistem operasi dibakar (burn) kedalam ROM oleh produsen PLC dan perangkat lunak kontrol yang mana digunakan pemakai untuk memprogram PLC.
Random Access Memory (RAM) dirancang agar informasi dapat ditulis atau dibaca ke memori. RAM digunakan sebagai area penyimpanan data sementara yang mungkin cepat berubah. RAM merupakan volatile memori. Baterai cadangan dibutuhkan untuk menghindari kehilangan data. Banyak PLC menggunakan teknologi CMOS-RAM. CMOS-RAM mempunyai arus yang sangat rendah dan dapat menjaga memori dengan baterai lithium untuk memperpanjang waktu 2 atau 5 tahun.
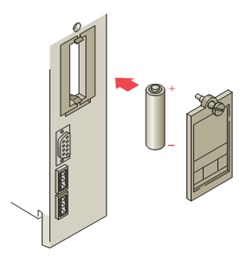
Gambar 2-41 Baterai cadangan untuk RAM processor
Erasable Progammable Read-Only Memory (EPROM) menyediakan tingkat keamanan dari perubahan program yang tidak diinginkan. EPROM dirancang agar data yang tersimpan dapat dibaca tetapi tidak mudah diubah tanpa perangkat khusus.
Electrically erasable programmable read-only memory (EEPROM) adalah nonvolatile memori yang menawarkan persamaan fleksibilatas pemrograman dengan RAM. EEPROM secara elektrik bisa ditulis ulang dengan data baru. Karena EEPROM merupakan nonvolatile memori, EEPROM tidak membutuhkan baterai cadangan. EEPROM menyediakan peyimpanan permanen dari program dan dapat secara mudah untuk diubah dengan perangkat pemrograman.
Flash EEPROM sama dengan EEPROM. Perbedaaan utama datang dari flash memory : sangat cepat untuk menyimpan dan mengambil file. Sebagai tambahan, Flash EEPROM tidak perlu dilepas dari processor untuk pemrograman ulang. Flash EEPROM secara otomatis menjadi cadangan dari RAM. Jika daya hilang ketika PLC sedang bekerja, PLC akan melanjutkan tanpa harus kehilangan data setelah daya ada lagi.

Gambar 2-42 Memori EEPROM

Gambar 2-43 Memori Flash
2.8 Perangkat Pemrograman
Perangkat pemrograman dibutuhkan untuk memasukan, modifikasi dan mencari permasalahan dari program PLC. Produsen PLC menggunakan beberapa jenis perangkat pemrograman. Perangkat yang sederhana adalah hand-held yang ditunjukan oleh gambar 2-44. Hand-held mempunyai multifunction keys dan LCD.
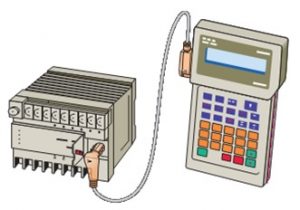
Gambar 2-44 Perangkat pemrograman hand-held
Metode paling banyak digunakan untuk memprogram PLC yaitu menggunakan personal komputer bersamaan dengan perangkat lunak dari pembuat PLC. Kemampuan yang umum dari perangkat lunak adalah menyunting program secara online dan offline, memonitor program secara online, mendokumentasikan program, mendiagnosis kegagalan PLC dan pencarian permasalahan dari sistem yang dikontrol. Sebagian besar perangkat lunak tidak memungkinkan untuk membuat program pada PLC yang berbeda pembuatnya.
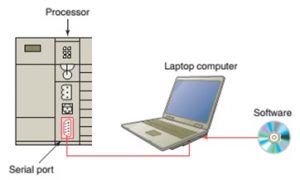
Gambar 2-45 Personal komputer digunakan sebagai perangkat pemrograman
Referensi :
- Programmable Logic Controller – Fifth Edition, Frank D Petruzella
- Automating Manufacturing System with PLCs, Hugh Jack
- Programmable Logic Controllers : An Emphasis on Design and Application – Third Edition, Kevin T Erickson
Leave a Comment